在现代制造业中,机器人视觉系统的应用已经成为提升智能制造水平的关键技术。FANUC作为机器人技术的领先企业,其iRvision-2D视觉系统在焊装车间的应用展现了机器人视觉技术在自动化生产中的重要角色。该系统能够引导机器人准确地完成焊接前的零件抓取任务,其核心在于通过视觉技术替代传统人工放置零件的方式,不仅提高了生产效率,而且提升了产品的质量一致性。
iRvision-2D视觉系统的核心功能是利用相机传感器拍摄零件的照片,通过视觉识别技术处理图像数据,从而计算出零件的位置信息,然后将这些信息传递给机器人。机器人根据这些信息进行精准的抓取动作。该系统的工作原理是建立在高精度定位的基础上,通过视觉系统准确识别零件位置,结合机器人的高重复定位精度,实现对零件的准确抓取。而这一过程的实现,需要通过视觉系统的五个主要步骤来完成,包括相机的选型、相机的调整和标定、视觉系统的安装和校准、视觉引导和机器人协作以及整个系统的测试与优化。
在相机选型方面,需要根据工件的大小和视觉系统的精度要求来确定合适的相机和镜头。相机的视野尺寸和系统所需的精度是决定相机分辨率的主要因素。例如,若视野为10mm,精度要求为0.02mm,则相机的像素大小应为500像素,对应的分辨率大约为30万像素(640*480)。相机的视野大小和精度是根据检测对象确定的最佳视野范围,视野越小,越能够精确地捕捉到工件的信息。
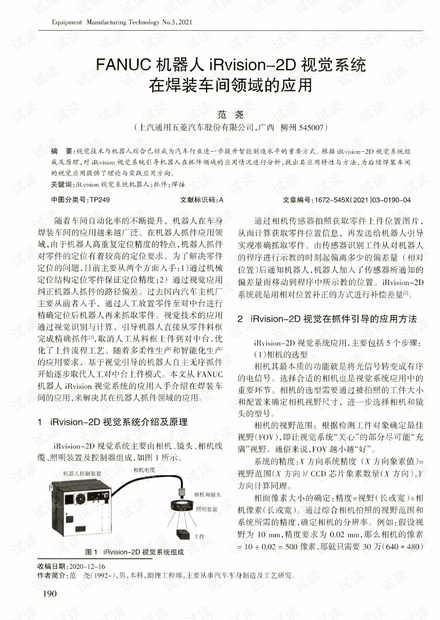
视觉系统的主要组成部分包括相机、镜头、相机线缆、照明装置以及控制器。在相机的调整和标定过程中,需要建立空间物体表面某点与图像中对应点之间的几何关系。通过点阵板对相机进行标定,获取机器人标定的相机数据,并基于这些数据获取基准坐标系和补正坐标系。此外,相机镜头的调整也非常重要,要确保相机能够连续成像,并使物体始终处于视野范围内。
视觉引导的机器人抓件过程涉及到机器人与视觉系统的协作,这个过程包括了对视觉系统捕捉到的图像进行处理,通过算法来识别工件的具体位置,然后将这些数据传送给机器人。机器人接收数据后,执行抓取动作,并实时校正因各种因素引起的定位偏差。通过视觉技术的应用,机器人可以在多种柔性生产和智能化生产中,实现自主无序抓件,逐步取代了过去的人工对中台上件模式。
视觉引导技术的引入,使得焊装车间的生产流程得到优化,上件流程不再依赖于人工,而是由机器人自动完成,大大提高了工作效率,降低了生产成本。此外,由于机器人能够稳定地重复执行高精度的动作,因此,产品的一致性和质量也得到了有效保证。
FANUC机器人iRvision-2D视觉系统在焊装车间的应用,不仅展示了机器人视觉技术在智能制造中的重要作用,也推动了焊装车间自动化和智能化的进程。通过这种技术的应用,可以有效地解决传统人工上件流程中的效率低下和质量不一等问题,为制造业的转型升级提供了切实可行的技术方案。未来随着机器学习和深度学习技术的发展,视觉引导技术在制造业中的应用将会更加广泛,进一步推动智能制造水平的提升。