Embedded systems introduction

This document provides an introduction to embedded systems. It defines embedded systems as computing systems with tightly coupled hardware and software that are designed to perform dedicated functions. Embedded systems have characteristics like reliability, efficiency, constrained resources, single-functionality, complex functionality where safety is critical. Common applications include automotive, telecommunications, consumer electronics, industrial equipment, medical devices, and more. The document outlines the design process for embedded systems including hardware/software partitioning and discusses processing engines like microprocessors and microcontrollers. It provides details on memory types, CPU architectures, and concludes with an overview of the software development process.





















































Embedded systems introduction
- 1. Introduction to embedded systems Eng : Mohamed Drahem
- 2. “ “Every expert was once a beginner.” 2
- 3. AGENDA • Embedded systems definition. • Embedded systems characteristics • Embedded systems applications. • Embedded systems design. • Processing Engines. • Micro-processors. Micro-controller.
- 4. Embedded System definition • All systems that contain one or more processor to do specific functionalities and give responses upon receiving inputs. This processor is not general purposes like general purpose Processor in PC’s and notebooks. • Embedded systems are computing systems with tightly coupled hardware and software integration, that are designed to perform a dedicated function. • systems are usually an integral part of a larger system, known as the embedding system. Multiple embedded systems can coexist in an embedding system.
- 5. Can Personal Computer be considered as an Embedded System as it integrates hardware and software to perform functions? Why? PC cannot be considered as an embedded system because: It uses a General- Purpose Processor. The system is built independently from the software runs on it.
- 7. Reliability & Efficiency • An error in an Embedded system application such as a TV remote control or compact disc player will result in a product that does not work and consequently does not sell. • An error in Embedded system application such as an rocket launching system or autopilot could be fatal. • Some Embedded systems may have real-time performance constraints that must be met, for reasons such as safety and usability.
- 9. Single-functionality • Dedicated to perform a specific function and include processors dedicated to specific function
- 10. Complex functionality • Often have to run sophisticated algorithms or multiple algorithms Cell phone, automotive, etc.
- 11. Safety is critical • Must not endanger human life and the environment
- 12. Maintainability • The ability to modify the system after its initial release and enhance its performance like execution time, code and memory size
- 13. Interactive System • An Embedded system should be as interactive as possible so that it is easily understandable, Operated and Handled by a user and provide ease of task.
- 14. Embedded Systems ▪ Perform ONLY Few applications that are known at design-time (i.e. special purpose). ▪ Not programmable by end user. ▪ Criteria ▪ Cost ▪ Power consumption ▪ Deterministic behavior ▪ Meeting time bounds ▪ Size General Purpose Systems ▪ Computing a lot of applications (i.e. general purpose). ▪ Programmable by end user ▪ Criteria ▪ Cost ▪ Average speed
- 16. Embedded systems applications • Automotive • Telecommunication • Electronic devices • Computers • Home automation • Industrial • Aviation technology • Banking • Robotics. • Aircraft electronics. • Cinema industry • Medical equipment • Wearable technologies • Mobile phones • Military • Solar systems
- 17. Automotive • Lightning system • Air bags • ABS • Parking system
- 18. Computers • Sound cards • Ethernet cards • Graphic cards
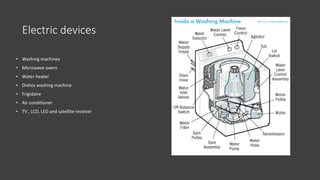
- 19. Electric devices • Washing machines • Microwave ovens • Water heater • Dishes washing machine • Frigidaire • Air conditioner • TV , LCD, LED and satellite receiver
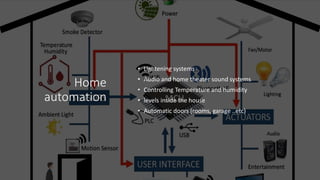
- 20. Home automation • Lightening systems • Audio and home theater sound systems • Controlling Temperature and humidity • levels inside the house • Automatic doors (rooms, garage ..etc)
- 21. Industrial • Factories huge robotic arms which assemble car components or any other machine
- 22. Military Tanks shooting systems Submarines SONAR systems Missiles and target identification systems
- 23. Telecommunications Mobile generations implementation : 3G and LTE Network : Wi-Fi chips, Routers and Switches
- 24. Aviation and aerospace technology Airplane Navigation systems GPS systems Satellites
- 25. Robotics • Robots for any purpose ( home aid, industrial, playing, security .. etc. )
- 26. Banking • Money counting machine • ATMs
- 28. Medical equipment and technologies ECG is a diagnostic tool that measures and records the electrical activity of the heart Ultrasound Fitness devices Cardiac peacemaker
- 31. Trade off between SW & HW Which functional blocks should be performed in Hardware? 01 Which functional blocks should be performed in software? 02
- 32. Software characteristics • Advantages • Highly configurable • Shorter development cycle • Easier in versions updates • Cheaper • Disadvantages • Constrained with processor speed which may satisfy real time application and may not.
- 33. Hardware characteristics • Advantages • Better performance in high speed real time application • Disadvantages • Longer development cycle. • Customized for specific application, not updatable (unchangeable).
- 34. HW/SW Partitioning Design and build the target hardware 01 Develop the software independently 02 Integrate them and hope it works 03
- 36. Embedded Systems Design Steps Modeling via modeling language (LabVIEW or Matlab) HW/SW partitioning (Determine which blocks must be H/W & which may be S/W) Global Design of the S/W part Unit Design of the S/W part Coding. Unit Testing. Integration Testing. Verification and Validation. Maintaining.
- 37. Embedded Systems Design Challenges Find an implementation that can perform the computation such that the requirements are satisfied. Embedded systems perform computations (software) that are subject to physical constraints (hardware) Execution on a physical platform: processor speed, power, storage, reliability.
- 38. Design goals • Performance(overall speed execution time and throughput). • Functionality and user interface. • Manufacturing cost. • Power consumption. • Safety. • Other requirements. (physical size, etc. )
- 39. System on board
- 40. System on chip
- 41. Microcontrollers • Basically a microcontroller can be described as a computer on a chip. a single chip containing a CPU, non-volatile memory (ROM), volatile memory(RAM), a timer and an I/O control unit. • •A microcontroller apart from the above mentioned components usually also include serial communication capabilities, interrupt controls and analog I/O capabilities. • •Used for a few dedicated functions determined by the system designer.
- 43. Microcontrollers don’t work alone in the circuit it must interfaces with other on chip devices like Sensors, Switches, LEDs, LCD, Keypad and DC Motor. Microcontroller can accept inputs from some components and provide outputs to other components within any given system. Differences in requirements, make the manufacturers produce different microcontrollers with different memory sizes, number of I/O lines and number of integrated peripheral devices. Other wise they are all similar to use.
- 44. Micro-processor • Just a CPU has to add externally memory, clock, input/output interfaces, timer and all other needed peripheral. This is the reason a microprocessor has so many pins. • The difference between a microcontroller and a microprocessor is that the microprocessor is a general purpose computer while a microcontroller is a computer dedicated to one or just a few tasks.
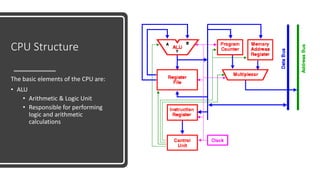
- 45. CPU Structure The basic elements of the CPU are: • ALU • Arithmetic & Logic Unit • Responsible for performing logic and arithmetic calculations
- 46. CPU Structure The basic elements of the CPU are: • Floating-Point Unit (FPU) • performs arithmetic operations on floating point numbers
- 47. CPU Structure The basic elements of the CPU are: • Registers • Registers are used to store data beside the ALU • Registers are used to transfer data to/from memory • Registers carry the inputs of ALU, as well as, • receiving the output of the ALU
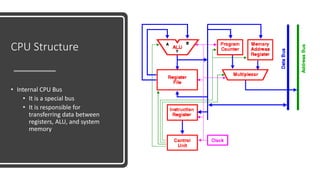
- 48. CPU Structure • Internal CPU Bus • It is a special bus • It is responsible for transferring data between registers, ALU, and system memory
- 49. CPU Structure • Control Unit • It is responsible for organizing the actions of the CPU. • It can be thought of as the heart of the CPU
- 50. Microcontroller CPU architectures • There are two basic types of architecture: • Von Neumann • Harvard
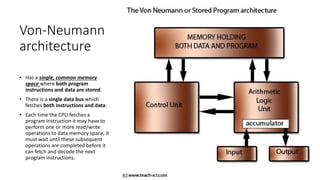
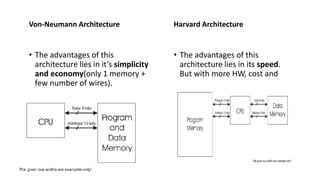
- 51. Von-Neumann architecture • Has a single, common memory space where both program instructions and data are stored. • There is a single data bus which fetches both instructions and data. • Each time the CPU fetches a program instruction it may have to perform one or more read/write operations to data memory space, it must wait until these subsequent operations are completed before it can fetch and decode the next program instructions.
- 52. Harvard Architecture • Harvard architecture computers have separate memory areas for program instructions and data. • One bus connects CPU to RAM memory(Data Memory). The other bus connects CPU to ROM memory(Program Memory). • The CPU can read an instruction and perform a data memory access at the same time. • This speeds up execution time but increases the cost of more hardware complexity.
- 53. Von-Neumann Architecture • The advantages of this architecture lies in it’s simplicity and economy(only 1 memory + few number of wires). Harvard Architecture • The advantages of this architecture lies in its speed. But with more HW, cost and
- 54. Memory unit • Memory is a part of the microcontroller used for data storage. • There are different types of memory Within the microcontroller: • ROM memory(Read Only Memory) • RAM memory(Random Access Memory).
- 55. RAM memory (Random Access Memory) Random access refers to the ability to access any memory cell directly. RAM is much faster than ROM. It used to write and read data values while program running 01 RAM is Volatile memory: •volatile: if you remove the power supply its contents are lost. •Any variable used in a program is allocated into RAM. •requires external power to maintain memory content. 02 Used to store data as long as Microcontroller is powered and the program is running 03
- 56. RAM Types • Dynamic RAM (DRAM): is a RAM device that requires periodic refreshing to retain its content. • Static RAM (SRAM): is a RAM device that retains its content as long as power is supplied by an external power source. ❖ SRAM does not require periodic refreshing and it is faster than DRAM.
- 57. Read Only Memory (ROM) several types of ROM : OTP Mask ROM Flash ROM EEPROM memory UV EPROM The size of the program that can be written depends on the size of ROM memory ROM is used to permanently save program being executed.
- 58. OTP ROM (One Time Programmable ROM): If the microcontroller contains this memory, you can download a program into the OTP, but the process of program downloading is “one-way ticket”, meaning that it can be done only once. OTP(One Time Programmable) devices are microcontrollers where once a program is written into the device it cannot be erased. used in products
- 59. Masked ROM Microcontrollers containing this ROM are mainly used by the huge manufacturers. Program is loaded onto the chip by the manufacturer. In case of large scale manufacturing, the price is very low. ROM whose contents are set by masking during the manufacturing process. Programmed upon microcontroller production
- 60. UV EPROM (UV Erasable Programmable ROM) The package of this microcontroller has recognizable “window” on the upper side. It enables surface of the silicon chip to be lit by an UV lamp, which has ,as a result, that complete program cleared and a new program download enabled.
- 61. EEPROM memory (Electrically Erasable Programmable ROM) • The contents of this memory may be changed during operation (similar to RAM), but remains permanently saved even if the power supply went off (similar to ROM). Accordingly, EEPROM is often used to store values, created during operation, which must be permanently saved
- 62. Number Systems Decimal Binary Hexadecimal
- 63. Testing
- 64. Software Process Activities Specification •Customer and engineer define the product and its constrains Development •Design •Programming Validation •Check to ensure customer requirements Evolution •Change to meet changes in customer or market needs
- 66. THANK YOU • MOHAMED DRAHEM • Embedded systems team leader at MSP Tech Club – Shoubra Engineering