(舊版 請點協會帳號參閱v0.2新版) micro:bit MeArm 機械手臂組裝手冊
0 likes155 views

本手册提供了micro:bit机械手臂Mearm的组装指南,包括所需材料和详细步骤。需要注意的是,此手册不包含编程教学,以及安装过程中必须关注的细节。操作说明包括使用摇杆控制机械手臂移动与爪子的开合。












































































(舊版 請點協會帳號參閱v0.2新版) micro:bit MeArm 機械手臂組裝手冊
- 3. 材料 • BBC micro:bit微型電腦 x1 – micro USB傳輸線 x1 • Thunder:bit擴充板 x1 – 18650鋰電池 x1 • MeArm機械手臂 x1 – TowerPro SG90迷你伺服馬達 x4 – 杜邦線 x3 – 束線帶 x2
- 10. 拆下零件
- 11. 撕下所有零件的保護紙
- 15. 安裝第一顆馬達
- 17. 手臂本體底座
- 19. 鎖入12mm螺絲
- 20. 手臂本體底座完成
- 21. 安裝第一個馬達葉片
- 23. 組裝手臂第一部分
- 24. 同樣用12mm螺絲固定
- 25. 手臂第二部分(裝上馬達葉片)
- 26. 鎖入尖頭螺絲
- 27. 完成手臂第二部分
- 31. 以12mm螺絲固定手臂兩部分
- 34. 手臂另一側連接手臂底座
- 35. 圓形墊片
- 36. 安裝手臂第三片馬達葉片
- 37. 前方
- 38. 裝上馬達固定板
- 40. 安裝爪子馬達固定板
- 44. 組裝爪子
- 47. 安裝大齒輪,鎖在右爪轉軸
- 50. 組裝兩片小齒輪
- 53. 調整爪子位置
- 54. 把爪子連接到手臂上
- 55. 用10mm螺絲固定兩側
- 57. 使用6mm螺絲,反過來鎖
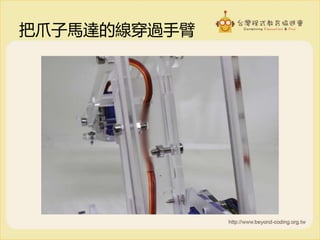
- 59. 把爪子馬達的線穿過手臂
- 60. 給馬達線接上杜邦線
- 61. 安裝Thunder:bit擴充板
- 62. 束線帶
- 63. 連接馬達
- 64. 橘色線朝內
- 67. 馬達操作 • 搖桿X軸 (左右):手臂左右轉動 • 搖桿Y軸 (前後):手臂前後移動 • 搖桿A鍵:爪子閉合 • 搖桿B鍵:爪子張開
- 68. PCA9685 • 我們得透過Thunder:bit的PCA9685腳位控制 MeArm的四個馬達,因為micro:bit本身能同 時控制的馬達最多為3個。 • 你必須在MakeCode編輯器加入PCA9685程 式套件。 – 編輯器:https://makecode.microbit.org/#editor
- 69. 新增擴展套件
- 70. 輸入PCA9685
- 72. 續下頁 手臂程式
- 73. 手臂程式 (續)
- 74. 校正馬達葉片位置 • 程式會在一開始讓MeArm手臂馬達轉到90 度 (爪子馬達除外) • 為了讓手臂運作得更順暢,馬達葉片的位 置可能得稍微調整
- 75. 建議的手臂初始位置
- 76. 建議的爪子齒輪位置
- 77. 聯絡我們 • 台灣程式教育協進會 – 網站 – http://www.beyond-coding.org.tw – FB – https://www.facebook.com/%E5%8F%B0%E7%81%A3%E7%A8%8B%E 5%BC%8F%E6%95%99%E8%82%B2%E5%8D%94%E9%80%B2%E6%9C %83-1925824431015426/ – 信箱 – [email protected]