3 d graphics with opengl part 1
Download as PPTX, PDF2 likes676 views

The document discusses computer graphics hardware and GPU computing. It explains that GPUs have thousands of smaller cores that are optimized for parallel processing compared to CPUs which have a few cores for serial processing. GPU computing uses both the CPU and GPU together, with serial code running on the CPU and parallel code on the GPU. The document also covers topics like the CUDA platform, GPU specifications, raster displays, frame buffers, double buffering, 3D graphics pipelines, and the different types of transformations involved in 3D rendering like model, view and projection transforms.































3 d graphics with opengl part 1
- 3. GPU GPU computing is the use of a GPU (graphics processing unit) together with a CPU to accelerate general-purpose scientific and engineering applications. Pioneered five years ago by NVIDIA, GPU computing has quickly become an industry standard. CPU + GPU is a powerful combination because CPUs consist of a few cores optimized for serial processing, while GPUs consist of thousands of smaller, more efficient cores designed for parallel performance. Serial portions of the code run on the CPU while parallel portions run on the GPU.
- 4. GPU
- 5. THE CUDA The CUDA parallel computing platform provides a few simple C and C++ extensions Its GeForce 256 GPU is capable of billions of calculations per second, can process a minimum of 10 million polygons per second, and has over 22 million transistors, compared to the 9 million found on the Pentium III.
- 6. Pixels and Frame All modern displays are raster-based. A raster is a 2D rectangular grid of pixels (or picture elements). A pixel has two properties: a color and a position. Color is expressed in RGB (Red-Green-Blue) components - typically 8 bits per component or 24 bits per pixel (or true color). The position is expressed in terms of (x, y) coordinates. The origin (0, 0) is located at the top-left corner, with x-axis pointing right and y-axis pointing down. This is different from the conventional 2D Cartesian coordinates, where y-axis is pointing upwards.
- 7. The number of color-bits per pixel is called the depth (or precision) of the display. The number of rows by columns of the rectangular grid is called the resolution of the display, which can range from 640x480 (VGA), 800x600 (SVGA), 1024x768 (XGA) to 1920x1080 (FHD), or even higher.
- 8. Frame Buffer and Refresh Rate The color values of the pixels are stored in a special part of graphics memory called frame buffer. The GPU writes the color value into the frame buffer. The display reads the color values from the frame buffer row-by-row, from left-to-right, top-to-bottom, and puts each of the values onto the screen. This is known as raster-scan. The display refreshes its screen several dozen times per second, typically 60Hz for LCD monitors and higher for CRT tubes. This is known as the refresh rate. A complete screen image is called a frame.
- 9. Double Buffering and VSync While the display is reading from the frame buffer to display the current frame, we might be updating its contents for the next frame (not necessarily in raster-scan manner). This would result in the so-called tearing, in which the screen shows parts of the old frame and parts of the new frame. This could be resolved by using so-called double buffering. Instead of using a single frame buffer, modern GPU uses two of them: a front buffer and a back buffer. The display reads from the front buffer, while we can write the next frame to the back buffer. When we finish, we signal to GPU to swap the front and back buffer (known as buffer swap or page flip).
- 10. Double buffering alone does not solve the entire problem, as the buffer swap might occur at an inappropriate time, for example, while the display is in the middle of displaying the old frame. This is resolved via the so-called vertical synchronization (or VSync) at the end of the raster-scan. When we signal to the GPU to do a buffer swap, the GPU will wait till the next VSync to perform the actual swap, after the entire current frame is displayed.
- 11. The most important point is: When the VSync buffer-swap is enabled, you cannot refresh the display faster than the refresh rate of the display!!! For the LCD/LED displays, the refresh rate is typically locked at 60Hz or 60 frames per second, or 16.7 milliseconds for each frame.
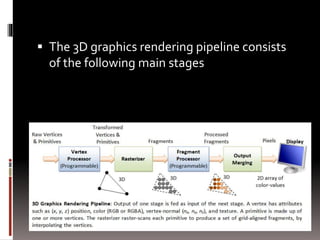
- 12. 3D Graphics Rendering Pipeline A pipeline, in computing terminology, refers to a series of processing stages in which the output from one stage is fed as the input of the next stage, similar to a factory assembly line or water/oil pipe. With massive parallelism, pipeline can greatly improve the overall throughput. In computer graphics, rendering is the process of producing image on the display from model description.
- 13. The 3D graphics rendering pipeline consists of the following main stages
- 14. Stage 1 Vertex Processing: Process and transform individual vertices. A vertex has attributes: position, color, vertex Normal
- 15. Vertices A vertex, in computer graphics, has these attributes: 1. Position in 3D space V=(x, y, z): typically expressed in floating point numbers. 2. Color: expressed in RGB (Red-Green-Blue) or RGBA (Red-Green-Blue-Alpha) components.
- 16. Vertices continue… Texture we often wrap a 2D image to an object to make it seen realistic. A vertex could have a 2D texture coordinates (s, t), which provides a reference point to a 2D texture image.
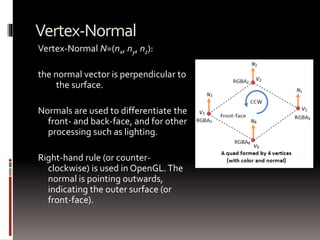
- 17. Vertex-Normal Vertex-Normal N=(nx, ny, nz): the normal vector is perpendicular to the surface. Normals are used to differentiate the front- and back-face, and for other processing such as lighting. Right-hand rule (or counter-clockwise) is used in OpenGL. The normal is pointing outwards, indicating the outer surface (or front-face).
- 18. In modern GPUs, the vertex processing stage and fragment processing stage are programmable. You can write programs, known as vertex shader and fragment shader to perform your custom transform for vertices and fragments. The shader programs are written in C-like high level languages such as GLSL (OpenGL Shading Language), HLSL (High-Level Shading Language for Microsoft Direct3D), or Cg (C for Graphics by NVIDIA).
- 19. Vertex Processing ….. In-depth Coordinates Transformation The process used to produce a 3D scene on the display in Computer Graphics is like taking a photograph with a camera. It involves four transformations: next slide…..
- 20. 1. Arrange the objects (or models, or avatar) in the world (Model Transformation orWorld transformation). 2. Position and orientate the camera (View transformation). 3. Select a camera lens (wide angle, normal or telescopic), adjust the focus length and zoom factor to set the camera's field of view (Projection transformation). 4. Print the photo on a selected area of the paper (Viewport transformation) - in rasterization stage A transform converts a vertex V from one space (or coordinate system) to another space V'. In computer graphics, transform is carried by multiplying the vector with a transformation matrix, i.e., V' = M V.
- 21. Model Transform (or Local Transform, or World Transform) Each object (or model or avatar) in a 3D scene is typically drawn in its own coordinate system, known as its model space (or local space, or object space).
- 22. Model Transform (or Local Transform, or World Transform) cont… As we assemble the objects, we need to transform the vertices from their local spaces to the world space, which is common to all the objects. This is known as the world transform. The world transform consists of a series of scaling (scale the object to match the dimensions of the world), rotation (align the axes), and translation (move the origin).
- 23. In OpenGL, a vertex V at (x, y, z) is represented as a 3x1 column vector: Other systems, such as Direct3D, use a row vector to represent a vertex.
- 24. Scaling 3D scaling can be represented in a 3x3 matrix: where αx, αy and αz represent the scaling factors in x, y and z direction, respectively. If all the factors are the same, it is called uniform scaling.
- 25. Scaling count.. We can obtain the transformed result V' of vertex V via matrix multiplication, as follows:
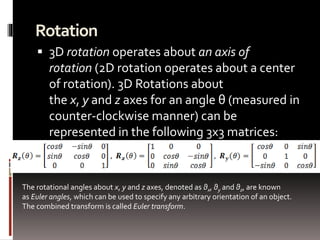
- 26. Rotation 3D rotation operates about an axis of rotation (2D rotation operates about a center of rotation). 3D Rotations about the x, y and z axes for an angle θ (measured in counter-clockwise manner) can be represented in the following 3x3 matrices: The rotational angles about x, y and z axes, denoted as θx, θy and θz, are known as Euler angles, which can be used to specify any arbitrary orientation of an object. The combined transform is called Euler transform.
- 27. Translation Translation does not belong to linear transform, but can be modeled via a vector addition, as follows:
- 28. Fortunately, we can represent translation using a 4x4 matrices and obtain the transformed result via matrix multiplication, if the vertices are represented in the so-called 4- component homogenous coordinates (x, y, z, 1), with an additional forth w-component of 1. The significance of the w-component later in projection transform. In general, if the w-component is not equal to 1, then (x, y, z, w) corresponds to Cartesian coordinates of (x/w, y/w, z/w). If w=0, it represents a vector, instead of a point (or vertex).
- 29. Using the 4-component homogenous coordinates, translation can be represented in a 4x4 matrix, as follows:
- 30. The transformed vertex V' can again be computed via matrix multiplication:
- 32. Transformation of Vertex-Normal Recall that a vector has a vertex-normal, in addition to (x, y, z) position and color. Suppose that M is a transform matrix, it can be applied to vertex-normal only if the transforms does not include non-uniform scaling. Otherwise, the transformed normal will not be orthogonal to the surface. For non-uniform scaling, we could use (M-1)T as the transform matrix, which ensure that the transformed normal remains orthogonal.
- 33. View Transform After the world transform, all the objects are assembled into the world space. We shall now place the camera to capture the view.
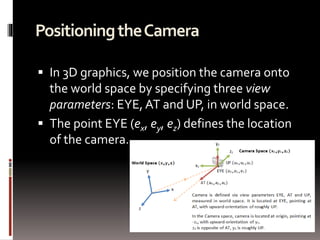
- 34. Positioning the Camera In 3D graphics, we position the camera onto the world space by specifying three view parameters: EYE, AT and UP, in world space. The point EYE (ex, ey, ez) defines the location of the camera.
- 35. Positioning the Camera The vector AT (ax, ay, az) denotes the direction where the camera is aiming at, usually at the center of the world or an object.
- 36. Positioning the Camera The vector UP (ux, uy, uz) denotes the upward orientation of the camera roughly. UP is typically coincided with the y-axis of the world space. UP is roughly orthogonal to AT, but not necessary. As UP and AT define a plane, we can construct an orthogonal vector to AT in the camera space.
- 37. In OpenGL, we can use the GLU function gluLookAt() to position the camera: The default settings of gluLookAt() is: That is, the camera is positioned at the origin (0, 0, 0), aimed into the screen (negative z-axis), and faced upwards (positive y-axis). To use the default settings, you have to place the objects at negative z-values.
- 38. Computing the Camera Coordinates From EYE, AT and UP, we first form the coordinate (xc, yc, zc) for the camera, relative to the world space. We fix zc to be the opposite of AT, i.e., AT is pointing at the - zc. We can obtain the direction of xc by taking the cross-product of AT and UP. Finally, we get the direction of yc by taking the cross-product of xc and zc. Take note that UP is roughly, but not necessarily, orthogonal to AT.
- 39. Transforming from World Space to Camera Space Now, the world space is represented by standard orthonormal bases (e1, e2, e3), where e1=(1, 0, 0), e2=(0, 1, 0) and e3=(0, 0, 1), with origin at O=(0, 0, 0). The camera space has orthonormal bases (xc, yc, zc) with origin at EYE=(ex, ey, ez). It is much more convenience to express all the coordinates in the camera space. This is done via view transform.
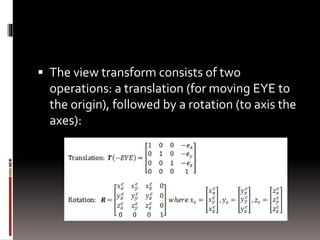
- 40. The view transform consists of two operations: a translation (for moving EYE to the origin), followed by a rotation (to axis the axes):
- 41. The View Matrix We can combine the two operations into one single View Matrix:
- 42. Model-View Transform In Computer Graphics, moving the objects relative to a fixed camera (Model transform), and moving the camera relative to a fixed object (View transform) produce the same image, and therefore are equivalent. OpenGL, therefore, manages the Model transform and View transform in the same manner on a so-called Model-View matrix. Projection transformation (in the next section) is managed via a Projection matrix.