


![Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
4
参考: バス路線図の分類[1]
[1] 奥村友利愛, 吉城 秀治, 辰巳 浩, 堤 香代子, 今里 鈴花 "バス路線図の実態把握と評価に関する研究."土木学会論文集D3 (土木計画学), Vol.75, No.5 (土木計
画学研究・論文集第36巻), I_911-I_922, 2019.
図は各種公式ホームページなどから](https://image.slidesharecdn.com/20230207-230310064117-868a5f38/85/A-Study-on-Generation-of-Deformed-Route-Maps-using-Octilinear-Grid-4-320.jpg)


![Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
7
関連研究
路線図の生成アルゴリズム[1][2]
入力: 地理データ 出力: 路線図
課題
全体を出力しているが、二地点間での路線図は考慮され
ていない
上記課題を本研究で調査・改良手法の提案
[1] Bast, Hannah, Patrick Brosi, and Sabine Storandt, “Metro maps on octilinear grid graphs”, Computer Graphics Forum. Vol. 39. No. 3. 2020.
[2] Hannah Bast, Patrick Brosi, and Sabine Storandt, “Metro Maps on Flexible Base Grids”, In 17th International Symposium on Spatial and Temporal
Databases (SSTD '21). Association for Computing Machinery, New York, NY, USA, pp.12–22, 2021.
生成した路線図の例](https://image.slidesharecdn.com/20230207-230310064117-868a5f38/85/A-Study-on-Generation-of-Deformed-Route-Maps-using-Octilinear-Grid-7-320.jpg)
![Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
8
研究目的
2地点・複数路線を選択したとき、切り出さ
れた路線図を理想の形状に近づける
事前処理に着目をし、路線図を生成する
理想の形状には複数種類がある
閲覧者・掲載場所により変化
全て満たすのは難しい
路線図サーベイ論文[3]掲載の10評価項目 (以下, 10評価)を
満たせる路線図を理想に設定
10項目を重視した路線図
アクセスマップなど地理情報が
必要な場合の理想的路線図
[3] Nöllenburg, Martin, “A survey on automated metro map layout methods”, Schematic Mapping Workshop.Essex, UK, 2014.](https://image.slidesharecdn.com/20230207-230310064117-868a5f38/85/A-Study-on-Generation-of-Deformed-Route-Maps-using-Octilinear-Grid-8-320.jpg)



![Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
12
topo, loomライブラリ
topo
入力: 交通網のラベル付きグラフ(折れ線グラフ)
出力: 駅における重なりのない折れ線グラフ(json)
手法はCao and Krummら[4]のものを活用
同じ方向の路線をグループ化して分離
変換前
変換後
[4] Cao, Lili, and John Krumm. "From GPS traces to a routable road map." Proceedings of the 17th ACM SIGSPATIAL international conference on advances in geographic
information systems. 2009.
[5] Hannah Bast, Patrick Brosi, and Sabine Storandt. “Efficient generation of geographically accurate transit maps”. In Proceedings of the 26th ACM SIGSPATIAL International
Conference on Advances in Geographic Information Systems (SIGSPATIAL '18). Association for Computing Machinery, New York, NY, USA, pp.13–22, 2018.
loom
入力: 折れ線グラフ
出力: 線の交差や分離を最小化するラベル順序を持つ折れ線グラフ
組み合わせ最適化問題(MLCM)、ノードでの交差のみ許可する
(MLNCM)手法[5]
変換前 変換後](https://image.slidesharecdn.com/20230207-230310064117-868a5f38/85/A-Study-on-Generation-of-Deformed-Route-Maps-using-Octilinear-Grid-12-320.jpg)
![Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved.
13
octiライブラリ
入力: 折れ線グラフ
出力:折れ線グラフの模式的変形
グリッドへ添わせる
関連研究の手法[1][2]
変換後
Octilinearグリッド](https://image.slidesharecdn.com/20230207-230310064117-868a5f38/85/A-Study-on-Generation-of-Deformed-Route-Maps-using-Octilinear-Grid-13-320.jpg)



























A Study on Generation of Deformed Route Maps using Octilinear Grid
- 1. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Octilinear格子を用いたデフォル メ路線図の生成に関する研究 北海道大学 工学部 情報エレクトロニクス学科 情報理工学コース 複雑系工学講座 調和系工学研究室 学部4年 阿部拓真
- 2. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 2 目次 研究背景 関連研究 研究目的 取り扱う10評価について LOOMについて 提案手法 実験 まとめ
- 3. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 3 研究背景 路線図: 駅利用者に目的地までの経由情報などを視 覚的に認識しやすい形で示す図 状況によって求める路線図の範囲・形状は変化さ せる必要性 どこで使われるか Webページ(スマホ・PC) 電車内、きっぷ売り場、ホーム、バス停… 何に使われるのか・使えるか アクセスマップ、全路線案内、停車駅案内、運賃表… 任意の二地点の移動経路の図示 本研究で取り扱う項目 路線の接続情報が最重要 デフォルメしたほうが路線のつながりを把握しやすい 本研究の対象 公共交通の利用者
- 4. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 4 参考: バス路線図の分類[1] [1] 奥村友利愛, 吉城 秀治, 辰巳 浩, 堤 香代子, 今里 鈴花 "バス路線図の実態把握と評価に関する研究."土木学会論文集D3 (土木計画学), Vol.75, No.5 (土木計 画学研究・論文集第36巻), I_911-I_922, 2019. 図は各種公式ホームページなどから
- 5. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 5 路線図生成の課題 路線図生成の課題 状況を判断し、適切な形状を決定する方法の確立 求められた範囲に基づいて路線図を効率的・正確 に生成する方法の確立 生成された路線図のユーザビリティの向上
- 6. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 6 路線図経路の生成事例 オンデマンドで任意の路線図を生成するサー ビスはない 課題の複雑性が一因にある 現状の二地点経路の提示状況(PC版で確認) Apple 経路探索をリスト形式で表示、 リストを選ぶと地図上に当該 経路を図示 Google, Yahoo! JAPAN 経路検索結果は地図上に一 通り表示し、選択中のリス トをハイライト表示
- 7. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 7 関連研究 路線図の生成アルゴリズム[1][2] 入力: 地理データ 出力: 路線図 課題 全体を出力しているが、二地点間での路線図は考慮され ていない 上記課題を本研究で調査・改良手法の提案 [1] Bast, Hannah, Patrick Brosi, and Sabine Storandt, “Metro maps on octilinear grid graphs”, Computer Graphics Forum. Vol. 39. No. 3. 2020. [2] Hannah Bast, Patrick Brosi, and Sabine Storandt, “Metro Maps on Flexible Base Grids”, In 17th International Symposium on Spatial and Temporal Databases (SSTD '21). Association for Computing Machinery, New York, NY, USA, pp.12–22, 2021. 生成した路線図の例
- 8. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 8 研究目的 2地点・複数路線を選択したとき、切り出さ れた路線図を理想の形状に近づける 事前処理に着目をし、路線図を生成する 理想の形状には複数種類がある 閲覧者・掲載場所により変化 全て満たすのは難しい 路線図サーベイ論文[3]掲載の10評価項目 (以下, 10評価)を 満たせる路線図を理想に設定 10項目を重視した路線図 アクセスマップなど地理情報が 必要な場合の理想的路線図 [3] Nöllenburg, Martin, “A survey on automated metro map layout methods”, Schematic Mapping Workshop.Essex, UK, 2014.
- 9. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 9 10評価(1/2) 評価項目 OK NG ネットワーク トポロジー変化 辺の向きの制約 折れ数/90°以下折 れ 交差駅の直進 角度分解能
- 10. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 10 10評価(2/2) 評価項目 OK NG 幾何学的な 歪み・変位↓ 辺の長さ 無関係駅同士の 分離 余白の量 駅名ラベルの 可読性
- 11. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 11 LOOMについて Line-Ordering Optimized Maps 地理座標からマップを生成するツール 軸は以下の3ツール topo: ネットワークの重なりなしグラフ loom: ライン順序の最適化 octi: グリッドに沿わせる最適化を行う
- 12. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 12 topo, loomライブラリ topo 入力: 交通網のラベル付きグラフ(折れ線グラフ) 出力: 駅における重なりのない折れ線グラフ(json) 手法はCao and Krummら[4]のものを活用 同じ方向の路線をグループ化して分離 変換前 変換後 [4] Cao, Lili, and John Krumm. "From GPS traces to a routable road map." Proceedings of the 17th ACM SIGSPATIAL international conference on advances in geographic information systems. 2009. [5] Hannah Bast, Patrick Brosi, and Sabine Storandt. “Efficient generation of geographically accurate transit maps”. In Proceedings of the 26th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems (SIGSPATIAL '18). Association for Computing Machinery, New York, NY, USA, pp.13–22, 2018. loom 入力: 折れ線グラフ 出力: 線の交差や分離を最小化するラベル順序を持つ折れ線グラフ 組み合わせ最適化問題(MLCM)、ノードでの交差のみ許可する (MLNCM)手法[5] 変換前 変換後
- 13. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 13 octiライブラリ 入力: 折れ線グラフ 出力:折れ線グラフの模式的変形 グリッドへ添わせる 関連研究の手法[1][2] 変換後 Octilinearグリッド
- 14. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 14 octi内部処理 図引用元 https://ad-publications.cs.uni-freiburg.de/EuroVis_octi-maps_slides.pdf Bast, Brosi, and Storandt, “Metro Maps on Octilinear Grid Graphs”. 元地図 次数2駅削除 グリッド敷設 最高次数駅フィット 隣接駅フィット 接続 隣接駅が続く限 り同様の処理 次数の高い隣接 駅へ移動し同様 の処理 … 処理の順番 赤:次数 黒: 処理順序
- 15. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 15 transitmapライブラリ 入力: 折れ線グラフ 出力: 折れ線グラフを可視化したsvgファイル 以下の手順でレンダリング ①平行線の描画 ②ノードなし 空間の確保 ③ノード間を 接続 ④駅を表現 図引用元 https://ad-publications.cs.uni-freiburg.de/SIGSPATIAL_transitmaps_2018_slides.pdf
- 16. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 16 提案手法のアルゴリズムについて
- 17. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 17 1. 入力データを座標付きの無向グラフに変換
- 18. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 18 2.盲腸線部分とそれ以外に分割する 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 探索順番を決定し、 次元数が1となる頂点を 順番に探索する : 探索対象 ※盲腸線 = 閉路から切り離した次元数2以下のグラフ
- 19. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 19 2.盲腸線部分とそれ以外に分割する 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 探索順番を決定し、 次元数が1となる頂点を 順番に探索する : 探索対象
- 20. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 20 2.盲腸線部分とそれ以外に分割する 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 探索順番を決定し、 次元数が1となる頂点を 順番に探索する : 探索対象
- 21. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 21 2.盲腸線部分とそれ以外に分割する 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 探索順番を決定し、 次元数が1となる頂点を 順番に探索する : 探索対象
- 22. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 22 2.盲腸線部分とそれ以外に分割する 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 探索順番を決定し、 次元数が1となる頂点を 順番に探索する : 探索対象
- 23. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 23 2.盲腸線部分とそれ以外に分割する 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 次元数が1となる頂点を枝の開始地 点とし、次元数が3以上になる頂点 を接続された頂点から探索 : 探索対象
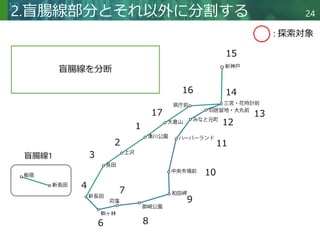
- 24. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 24 2.盲腸線部分とそれ以外に分割する 1 2 3 6 7 8 9 10 11 12 13 14 15 16 17 盲腸線を分断 盲腸線1 4 : 探索対象
- 25. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 25 2.盲腸線部分とそれ以外に分割する 1 2 3 6 7 8 9 10 11 12 13 14 15 16 17 次元数が1となる頂点の探索を行う → これらの作業を繰り返す 盲腸線1 4 : 探索対象
- 26. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 26 2.盲腸線部分とそれ以外に分割する 1 2 3 6 7 8 9 10 11 12 13 14 15 16 17 次元数が1となる頂点の探索を行う → これらの作業を繰り返す 盲腸線1 4 : 探索対象
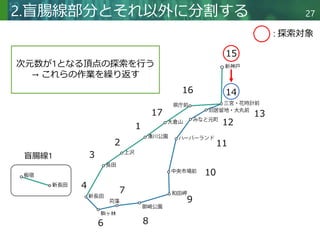
- 27. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 27 2.盲腸線部分とそれ以外に分割する 1 2 3 6 7 8 9 10 11 12 13 14 15 16 17 次元数が1となる頂点の探索を行う → これらの作業を繰り返す 盲腸線1 4 : 探索対象
- 28. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 28 2.盲腸線部分とそれ以外に分割する 1 2 3 6 7 8 9 10 11 12 13 16 17 次元数が1となる頂点の探索を行う → これらの作業を繰り返す 盲腸線1 4 : 探索対象 盲腸線2
- 29. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 29 3. それぞれのグラフをLOOMで処理 盲腸線1 盲腸線2
- 30. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 30 3. それぞれのグラフをLOOMで処理 盲腸線1 盲腸線2
- 31. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 31 4. 切り離した盲腸線の同一地点を統合させる 盲腸線1 盲腸線2
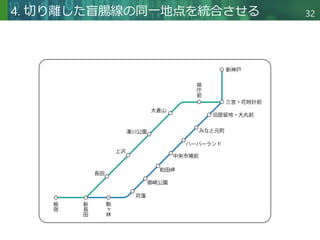
- 32. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 32 4. 切り離した盲腸線の同一地点を統合させる
- 33. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 33 実験目的・実験設定 目的: 各手法の特性確認 以下の3パターンで検証 中心駅~郊外駅 郊外駅~郊外駅 中心駅~中心駅 中心駅: 乗換路線がある 郊外駅: それ以外の駅 10評価で評価 以下の3種類を定性・定量的に評価するために、別途 基準を設定 LOOM → 2地点間の切り出し 元座標データから公式路線図と同範囲を抽出してからLOOM で処理、その後指定範囲切り出し 2地点間の切り出し → LOOM 元座標データから指定範囲を切り出し、LOOMで処理 2地点間の切り出し → LOOM(提案手法) 元座標データから指定範囲を切り出し、提案手法で処理 中心駅 郊外駅
- 34. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 34 10評価(1/2) 評価項目 OK NG ネットワーク トポロジー変化 辺の向きの制約 折れ数/90°以下折 れ 交差駅の直進 角度分解能 区間ごとで変化が大きくなると 予想される項目
- 35. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 35 10評価(2/2) 評価項目 OK NG 幾何学的な 歪み・変位↓ 辺の長さ 無関係駅同士の 分離 余白の量 駅名ラベルの 可読性
- 36. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 36 区間1(中心~中心) 元データ LOOM→2地点間切り出し 2地点間切り出し→LOOM 2地点間切り出し→提案手法 : 90°以下での曲がりをしている地点
- 37. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 37 区間1 評価項目 LOOM→2地点 2地点→LOOM 2地点→LOOM (提案手法) ネットワーク トポロジー変化↓ 0 0 0 辺の向きの制約↓ 0 0 0 折れ数↓/90°以下折れ↓ 5/0 6/3 6/3 交差駅の直進↓ 1 2 2 角度分解能↓ 2 1 1 幾何学的な 歪み・変位↓ 0 0 0 辺の長さ 均一 偏りあり 偏りあり 無関係駅同士の分離 OK OK OK 余白の量 元と変わらず 均一化 均一化 駅名ラベルの 可読性 一部向上 向上 向上 数値合計↓ 8 12 12
- 38. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 38 区間2(郊外~郊外) LOOM→2地点間切り出し 2地点間切り出し→LOOM 2地点間切り出し→提案手法 元データ : 90°以下での曲がりをしている地点
- 39. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 39 区間2 評価項目 LOOM→2地点 2地点→LOOM 2地点→LOOM (提案手法) ネットワーク トポロジー変化↓ 0 0 0 辺の向きの制約↓ 0 0 0 折れ数↓/90°以下折れ↓ 14/3 11/2 12/1 交差駅の直進↓ 6 3 3 角度分解能↓ 3 3 3 幾何学的な 歪み・変位↓ 1 2 0 辺の長さ 均一 均一 均一 無関係駅同士の分離 OK OK OK 余白の量 均一化 均一化 均一化 駅名ラベルの 可読性 低下 向上 向上 数値合計↓ 27 21 19
- 40. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 40 区間3(中心~郊外) 元データ LOOM→2地点間切り出し 2地点間切り出し→LOOM 2地点間切り出し→提案手法 : 路線の重なりが生じている区間 : 90°以下での曲がりをしている地点
- 41. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 41 区間3 評価項目 LOOM→2地点 2地点→LOOM 2地点→LOOM (提案手法) ネットワーク トポロジー変化↓ 0 0 2 辺の向きの制約↓ 0 0 0 折れ数↓/90°以下折れ↓ 4/0 6/2 9/6 交差駅の直進↓ 1 3 2 角度分解能↓ 1 1 1 幾何学的な 歪み・変位↓ 0 0 2 辺の長さ 均一 均一 均一 無関係駅同士の分離 OK OK 一部不適 余白の量 均一化 均一化 均一化 駅名ラベルの 可読性 向上 向上 一部向上 数値合計↓ 8 12 12
- 42. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 42 考察 提案手法では必ずしも従来手法と比較し評価 項目が改善しなかった(区間1,3/折れ数・直進 性) 盲腸線を再度連結する際、他路線の位置関係を提 案手法では考慮していないため 改良後の閉路が元の座標に影響されるため 特定の条件下では提案手法が機能(区間2/歪 み・90°以下の折れ数において) 閉路が丸くなる特性が提案手法にあり、環状線な どの地理的に円形に近い路線の表現が向上するた め 閉路の外周が環状線になった場合に限る
- 43. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. Copyright © 2020 調和系工学研究室 - 北海道大学 大学院情報科学研究院 情報理工学部門 複合情報工学分野 – All rights reserved. 43 まとめ LOOMを使用した2地点間路線図生成における 新手法を提案 提案手法を含めた3種類を各事例に当てはめ10指 標で評価 結果 提案手法が同時に全評価項目を満たすことはなかった 一方で特定事例では提案手法の有用性が確認できた 地理的に円形の路線が閉路の外周になる場合 今後の課題 盲腸線の接続角度の考慮 閉路の回転を含めた事前処理