




































Computer graphics iv unit
- 1. Computer Graphics Visible Surface Detection Methods
- 2. Learning Objectives Classification of Visible Surface Detection Algorithms Back-Face Detection Depth-Buffer Method A Buffer Method Scan-Line Method Depth-Sorting Method BSP – TREE Method Area Sub Division Method Octree Method Ray Casting Method Curved Surfaces Wire-Frame Visibility Methods Visibility Detection Functions
- 3. Visible Surface Detection A major consideration in the generatation of realistic graphics is determining what is visible within a scene from a chosen viewing position Algorithms to detect visible objects are referred to as visible-surface detection methods
- 4. Classification of Visible Surface Detection Algorithms Object-space methods Compares objects and parts of object to each other within the scene definition to determine which surfaces should be marked as visible Image-space methods Visibility is decided point by point at each pixel position
- 5. Back-Face Detection A fast and simple object-space method for locating back faces A point (x,y,z) is “inside” a polygon surface with plane parameters A, B, C, D if : Ax + By + Cz + D < 0 When an inside point is along the line of sight to the surface, the polygon must be a back face and so cannot be seen
- 6. Back-Face Detection The test is simplified by considering the normal vector N to the polygon and the viewing vector V This is back face if V · N > 0
- 7. Back-Face Detection … V.N = Vz . C > 0 In right handed viewing system, the polygon is a back face if C <= 0
- 8. Depth(Z) Buffer Method A commonly used image-space approach Each surface is processed separately, one point at a time Also called the z-buffer method It is generally hardware implemented
- 9. Depth Buffer Method 3 surfaces overlap at (x, y). S1 has the smallest depth value
- 10. Depth Buffer Method Two buffers are needed Depth buffer (distance information) Frame buffer (intensity/color information)
- 11. Depth Buffer Method Depth-Buffer Algorithm for all (x,y) depthBuff(x,y) = 1.0, frameBuff(x,y)=backgndcolor for each polygon P for each position (x,y) on polygon P calculate depth z if z < depthBuff(x,y) then depthBuff(x,y) =z frameBuff(x,y)=surfColor(x,y)
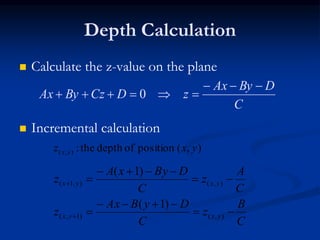
- 12. Depth Calculation Calculate the z-value on the plane Incremental calculation C DByAx zDCzByAx 0 C B z C DyBAx z C A z C DByxA z yxyx yxyx ),()1,( ),(),1( )1( )1( ),(positionofdepththe:),( yxz yx
- 13. Accumulation Buffer (A-Buffer) An extension of the depth-buffer for dealing with anti-aliasing, area-averaging, transparency, and translucency The depth-buffer method identifies only one visible surface at each pixel position Cannot accumulate color values for more than one transparent and translucent surfaces Even more memory intensive Widely used for high quality rendering
- 14. Accumulation Buffer (A-Buffer) Each position in the A-buffer has two fields Depth field: Stores a depth value Surface data field RGB intensity components Opacity parameter (percent of transparency) Depth Percent of area coverage Surface identifier
- 15. Scan-Line Method Image space method Extension of scan-line algorithm for polygon filling As each scan line is processed, all polygon surface projections intersecting that line are examined to determine which are visible
- 17. Scan-Line Method (cont…) Pixel positions across each scan-line are processed from left to right At the left intersection with a surface the surface flag is turned on (S1flag, S2 flag – on/off) At the right intersection point the flag is turned off We only need to perform depth calculations when more than one surface has its flag turned on at a certain scan-line position
- 18. Scan-Line Method (cont…) Two important tables are maintained: The edge table The surface facet table The edge table contains: Coordinate end points of reach line in the scene The inverse slope of each line Pointers into the surface facet table to connect edges to surfaces
- 19. Scan-Line Method (cont…) The surface facet tables contains: The plane coefficients Surface material properties Other surface data Maybe pointers into the edge table
- 20. Scan-Line Method Limitations The scan-line method runs into trouble when surfaces cut through each other or otherwise cyclically overlap Such surfaces need to be divided ImagestakenfromHearn&Baker,“ComputerGraphicswithOpenGL”(2004)
- 22. Depth-Sorting Method Both image-space and object-space operations Also called painter’s algorithm Surfaces sorted in order of increasing depth Surfaces scan-converted in order, starting with the surface of greatest depth B behind A as seen by viewer Fill B then A
- 23. Depth Sorting We make the following tests for each polygon that has a depth overlap with S If any one of these tests is true, no reordering is necessary for S and the polygon being tested Polygon S is completely behind the overlapping surface relative to the viewing position The overlapping polygon is completely in front of S relative to the viewing position The boundary-edge projections of the two polygons onto the view plane do not overlap
- 24. Depth Sorting
- 25. Depth Sorting
- 27. BSP Trees Binary space partitioning is an efficient method for determining object visibility Paint surfaces into the frame buffer from back to front Particularly useful when the view reference point changes, but the objects are at fixed positions
- 28. BSP Tree Construction 1. Choose a polygon T and compute the equation of the plane it defines 2. Test all the vertices of all the other polygons to determine if they are in front of, behind, or in the same plane as T. 3. If the plane intersects a polygon, divide the polygon at the plane 4. Polygons are placed into a binary search three with T as the root 5. Call the procedure recursively on the left and right subtree
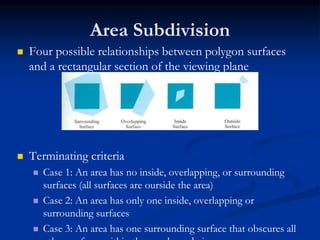
- 30. Area Subdivision Four possible relationships between polygon surfaces and a rectangular section of the viewing plane Terminating criteria Case 1: An area has no inside, overlapping, or surrounding surfaces (all surfaces are ourside the area) Case 2: An area has only one inside, overlapping or surrounding surfaces Case 3: An area has one surrounding surface that obscures all
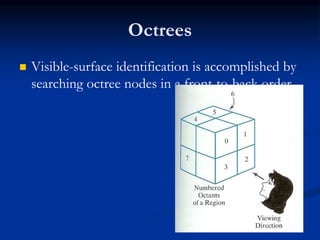
- 31. Octrees Visible-surface identification is accomplished by searching octree nodes in a front-to-back order
- 32. Ray Casting We consider the line of sight from the a pixel position through the scene Useful for volume data Ray casting is a special case of ray tracing that we will study later
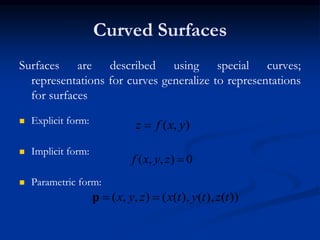
- 34. Curved Surfaces Surfaces are described using special curves; representations for curves generalize to representations for surfaces Explicit form: Implicit form: Parametric form: ),( yxfz 0),,( zyxf ))(),(),((),,( tztytxzyx p
- 35. Surface contour plots Y = f(x,z) Identify visible curve section maintain ymin to y max values previously calculated for the pixel x Increment x by 1 and find y, if y in the range, y not visible. Otherwise visible Similarlly find YZ plane and XZ plane to find visible area
- 36. Display all object edges – difficult to determine front and back Depth cueing – displayed intensity of a line is a function of its distance from the viewer Wire-Frame Visibility Methods
- 37. Wire-Frame Visibility Methods Detect hidden lines and display them differently
- 38. Wire-Frame Surface-Visibility Compare edge positions with surface positions Similar to line clipping, but we need to compare depths as well
- 39. Wire-Frame Depth Cueing Vary the brightness of objects in a scene as a function of distance from the viewing position minmax max )( dd dd dfdepth Multiply each pixel color by: Where d is the distance of a point from the viewing position
- 40. Visibility Detection Functions Back-face removal: glEnable(GL_CULL_FACE); glCullFace(mode); GL_BACK, GL_FRONT, GL_FRONT_AND_BACK glDisable(GL_CULL_FACE); default GL_BACK is default. Sometimes we want to see the back faces, for example if we are in a room we can use GL_FRONT
- 41. Visibility Detection Functions Depth-buffer functions: Request depth buffer when initializing: glutInitDisplayMode(GLUT_SINGLE|GLUT_RGB|GLUT_DEPTH); Clear depth buffer each time a new frame is displayed: glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); OpenGL depth-buffer visibility-detection routines can be activated with glEnable(GL_DEPTH_TEST); and deactivated with glDisable(GL_DEPTH_TEST);
- 42. Visibility Detection Functions Wire-frame surface visibility: glPolygonMode(GL_FRONT_AND_BACK, GL_LINE);
- 43. Visibility Detection Functions Depth cueing: glEnable(GL_FOG); glFogi(GL_FOG_MODE, GL_LINEAR); This applies the linear depth function to object colors using dmin=0.0 and dmax=1.0. We can set different values for dmin and dmax with the following function calls glFogf(GL_FOG_START, minDepth); glFogf(GL_FOG_END, maxDepth); Hidden line hidden surface removal(HLHSR) FUNCTION setHLHSRidentifier(visibilityfunctionIndex)