































































CPU Scheduling.pptx this is operating system
- 1. CPU Scheduling and Deadlock Module 3
- 2. • CPU scheduling(short-term scheduler) focuses on selecting process from the ready queue and allocates the CPU, • while process scheduling(long-term scheduler) involves managing the overall lifecycle of process, including creating, terminating and suspending them, as well moving them between different queues.
- 3. Basic concept In a single-processor system, • Only one process may run at a time. • Other processes must wait until the CPU is rescheduled. Objective of multi programming: • To have some process running at all times, in order to maximize CPU utilization.
- 4. CPU-I/0 Burst Cycle • Process execution consists of a cycle of – CPU execution and – I/O wait • Process execution begins with a CPU burst, followed by an I/O burst, then another CPU burst, etc… • Finally, a CPU burst ends with a request to terminate execution. • An I/O-bound program typically has many short CPU bursts. • A CPU-bound program might have a few long CPU bursts.
- 5. Fig Alternating sequence of CPU and I/O bursts
- 6. Fig: Histogram of CPU-burst durations The curve generally characterized as potential or hyper exponential, with large number of short CPU busts and small number of long CPU bursts.
- 7. CPU Scheduler This scheduler selects a waiting-process from the ready-queue and allocates CPU to the waiting-process. • The ready-queue could be a FIFO, priority queue, tree and list. • The records in the queues are generally process control blocks (PCBs) of the processes. CPU Scheduling Four situations under which CPU scheduling decisions take place: 1. When a process switches from the running state to the waiting state. For ex; I/O request. 2. When a process switches from the running state to the ready state. For ex: when an interrupt occurs. 3. When a process switches from the waiting state to the ready state. For ex: completion of I/O. 4. When a process terminates. Scheduling under 1 and 4 is non- preemptive. Scheduling under 2 and 3 is preemptive.
- 8. Non Preemptive Scheduling Once the CPU has been allocated to a process, the process keeps the CPU until it releases the CPU either • by terminating or • by switching to the waiting state Preemptive Scheduling This is driven by the idea of prioritized computation. • Processes that are runnable may be temporarily suspended Disadvantages: 1. Incurs a cost associated with access to shared-data. 2. Affects the design of the OS kernel.
- 9. Dispatcher • It gives control of the CPU to the process selected by the short-term scheduler. The function involves: 1. Switching context 2. Switching to user mode& 3. Jumping to the proper location in the user program to restart that program • It should be as fast as possible, since it is invoked during every process switch. • Dispatch latency means the time taken by the dispatcher to – stop one process and – start another running.
- 10. SCHEDULING CRITERIA: In choosing which algorithm to use in a particular situation, depends upon the properties of the various algorithms. Many criteria have been suggested for comparing CPU- scheduling algorithms. The criteria include the following: 1. CPU utilization: We want to keep the CPU as busy as possible. Conceptually, CPU utilization can range from 0 to 100 percent. In a real system, it should range from 40 percent (for a lightly loaded system) to 90 percent (for a heavily used system). 2. Throughput: If the CPU is busy executing processes, then work is being done. One measure of work is the number of processes that are completed per time unit, called throughput. For long processes, this rate may be one process per hour; for short transactions, it may be ten processes per second.
- 11. 3. Turnaround time. This is the important criterion which tells how long it takes to execute that process. The interval from the time of submission of a process to the time of completion is the turnaround time. Turnaround time is the sum of the periods spent waiting to get into memory, waiting in the ready queue, executing on the CPU, and doing I/0. 4. Waiting time: The CPU-scheduling algorithm does not affect the amount of time during which a process executes or does I/0, it affects only the amount of time that a process spends waiting in the ready queue. Waiting time is the sum of the periods spent waiting in the ready queue. 5. Response time: In an interactive system, turnaround time may not be the best criterion. Often, a process can produce some output fairly early and can continue computing new results while previous results are being output to the user. Thus, another measure is the time from the submission of a request until the first response is produced. This measure, called response time, is the time it takes to start responding, not the time it takes to output the response. The turnaround time is generally limited by the speed of the output device.
- 12. SCHEDULING ALGORITHMS • CPU scheduling deals with the problem of deciding which of the processes in the ready-queue is to be allocated the CPU. • Following are some scheduling algorithms: FCFS scheduling (First Come First Served) Round Robin scheduling SJF scheduling (Shortest Job First) Priority scheduling Multilevel Queue scheduling and Multilevel Feedback Queue scheduling
- 13. FCFS Scheduling • The process that requests the CPU first is allocated the CPU first. • The implementation is easily done using a FIFO queue. Procedure: 1. When a process enters the ready-queue, its PCB is linked onto the tail of the queue. 2. When the CPU is free, the CPU is allocated to the process at the queue's head. 3. The running process is then removed from the queue. Advantage: 1. Code is simple to write & understand. Disadvantages: 1. Convoy effect: All other processes wait for one big process to get off the CPU. 2. Non-preemptive (a process keeps the CPU until it release sit). 3. Not good for time-sharing systems. 4. The average waiting time is generally not minimal.
- 14. Example: Suppose that the processes arrive in the order P1, P2,P3. The Gantt Chart for the schedule is as follows: Waiting time for P1 = 0; P2 = 24; P3 =27 Average waiting time: (0 + 24 + 27)/3 = 17ms
- 15. Suppose that the processes arrive in the order P2, P3,P1. The Gantt chart for the schedule is as follows: • Waiting time for P1 = 6;P2 = 0; P3 =3 •Average waiting time: (6 + 0 + 3)/3 = 3ms
- 16. SJF Scheduling • The CPU is assigned to the process that has the smallest next CPU burst. • If two processes have the same length CPU burst, FCFS scheduling is used to break the tie. • For long-term scheduling in a batch system, we can use the process time limit specified by the user, as the ‘length’ • SJF can't be implemented at the level of short-term scheduling, because there is no way to know the length of the next CPU burst Advantage: • 1. The SJF is optimal, i.e. it gives the minimum average waiting time for a given set of processes. Disadvantage: • 1. Determining the length of the next CPU burst.
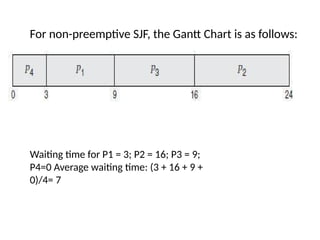
- 17. SJF algorithm may be either 1) non-preemptive or 2)preemptive. 1. Non preemptive SJF • The current process is allowed to finish its CPU burst. 2. Preemptive SJF • If the new process has a shorter next CPU burst than what is left of the executing process, that process is preempted. It is also known as SRTF scheduling (Shortest-Remaining-Time- First). • Example (for non-preemptive SJF): Consider the following set of processes, with the length of the CPU-burst time given in milliseconds.
- 18. For non-preemptive SJF, the Gantt Chart is as follows: Waiting time for P1 = 3; P2 = 16; P3 = 9; P4=0 Average waiting time: (3 + 16 + 9 + 0)/4= 7
- 19. •preemptive SJF/SRTF: Consider the following set of processes, with the length of the CPU- burst time given in milliseconds •For preemptive SJF, the Gantt Chart is as follows: • The average waiting time is ((10 - 1) + (1 - 1) + (17 - 2) + (5 - 3))/4 = 26/4 =6.5.
- 20. Priority Scheduling A priority is associated with each process. • The CPU is allocated to the process with the highest priority. • Equal-priority processes are scheduled in FCFS order. • Priorities can be defined either internally or externally. 1. Internally-defined priorities. Use some measurable quantity to compute the priority of a process. For example: time limits, memory requirements, no. f open files. 2. Externally-defined priorities. • Set by criteria that are external to the OS For example: • importance of the process, political factors • Priority scheduling can be either preemptive or non-preemptive.
- 21. 1.Preemptive • The CPU is preempted if the priority of the newly arrived process is higher than the priority of the currently running process. 2. Non Preemptive • The new process is put at the head of the ready-queue Advantage: • Higher priority processes can be executed first. Disadvantage: • Indefinite blocking, where low-priority processes are left waiting indefinitely for CPU. Solution: Aging is a technique of increasing priority of processes that wait in system for a long time.
- 22. Example: Consider the following set of processes, assumed to have arrived at time 0, in the order PI, P2, ..., P5, with the length of the CPU-burst time given in milliseconds. The Gantt chart for the schedule is as follows: The average waiting time is 8.2milliseconds
- 23. Round Robin Scheduling • Designed especially for time sharing systems. • It is similar to FCFS scheduling, but with preemption. • A small unit of time is called a time quantum(or time slice). • Time quantum is ranges from 10 to 100ms. • The ready-queue is treated as a circular queue. • The CPU scheduler goes around the ready-queue and allocates the CPU to each process for a time interval of up to 1 time quantum. • To implement: The ready-queue is kept as a FIFO queue of processes • CPU scheduler 1. Picks the first process from the ready-queue. 2. Sets a timer to interrupt after 1 time quantum and 3. Dispatches the process.
- 24. One of two things will then happen. • 1. The process may have a CPU burst of less than 1 time quantum. In this case, the process itself will release the CPU voluntarily. • 2. If the CPU burst of the currently running process is longer than 1 time quantum, the timer will go off and will cause an interrupt to the OS. The process will be put at the tail of the ready-queue. Advantage: • Higher average turnaround than SJF. Disadvantage: • Better response time than SJF.
- 25. Example: Consider the following set of processes that arrive at time 0, with the length of the CPU-burst time given in milliseconds The Gantt chart for the schedule is as follows: The average waiting time is 17/3 = 5.66milliseconds.
- 26. • The RR scheduling algorithm is preemptive. No process is allocated the CPU for more than 1 time quantum in a row. If a process' CPU burst exceeds 1 time quantum, that process is preempted and is put back in the ready- queue. • The performance of algorithm depends heavily on the size of the time quantum. 1. If time quantum=very large, RR policy is the same as the FCFS policy. 2. If time quantum=very small, RR approach appears to the users as though each of n processes has its own processor running at l/n the speed of the real processor. • In software, we need to consider the effect of context switching on the performance of RR scheduling 1. Larger the time quantum for a specific process time, less time is spend on context switching. 2. The smaller the time quantum, more overhead is added for the purpose of context- switching.
- 27. Fig: How a smaller time quantum increases context switches
- 28. Fig: How turnaround time varies with the time quantum
- 29. Multilevel Queue Scheduling • Useful for situations in which processes are easily classified into different groups. • For example, a common division is made between o foreground (or interactive) processes and o background (or batch) processes. • The ready-queue is partitioned into several separate queues • The processes are permanently assigned to one queue based on some property like o memory size o process priority or o process type. • Each queue has its own scheduling algorithm.
- 30. For example, separate queues might be used for foreground and background processes. Fig Multilevel queue scheduling
- 31. • There must be scheduling among the queues, which is commonly implemented as fixed-priority preemptive scheduling. • For example, the foreground queue may have absolute priority over the background queue. • Time slice: each queue gets a certain amount of CPU time which it can schedule amongst its processes; i.e., 80% to foreground in RR 20% to background in FCFS
- 32. Multilevel Feedback Queue Scheduling A process may move between queues • The basic idea: Separate processes according to the features of their CPU bursts. For example 1. If a process uses too much CPU time, it will be moved to a lower-priority queue. This scheme leaves I/O- bound and interactive processes in the higher-priority queues. 2. If a process waits too long in a lower-priority queue, it may be moved to a higher-priority queue This form of aging prevents starvation.
- 34. • In general, a multilevel feedback queue scheduler is defined by the following parameters: 1. The number of queues. 2. The scheduling algorithm for each queue. 3. The method used to determine when to upgrade a process to a higher priority queue. 4. The method used to determine when to demote a process to a lower priority queue. 5. The method used to determine which queue a process will enter when that process needs service.
- 35. THREAD SCHEDULING • On OSs, it is kernel-level threads but not processes that are being scheduled by the OS. • User-level threads are managed by a thread library, and the kernel is unaware of them. • To run on a CPU, user-level threads must be mapped to an associated kernel- level thread. Contention Scope Two approaches Process-Contention scope • On systems implementing the many-to-one and many-to-many models, • thread library schedules user-level threads to run on an available Light weight Processor. • Competition for the CPU takes place among threads belonging to the same process.
- 36. System-Contention scope • The process of deciding which kernel thread to schedule on the CPU. • Competition for the CPU takes place among all threads in the system. • Systems using the one-to-one model schedule threads using only SCS.
- 37. Pthread Scheduling • Pthread API that allows specifying either PCS or SCS during thread creation. • Pthreads identifies the following contention scope values: PTHREAD_SCOPE _PROCESS schedules threads using PCS scheduling. PTHREAD-SCOPE_SYSTEM schedules threads using SCS scheduling. • Pthread IPC provides following two functions for getting and setting the contention scope policy: pthread_attr_setscope(pthread_attr_t *attr, int *scope) pthread_attr_getscope(pthread_attr_t *attr, int*scope)
- 38. MULTIPLE PROCESSOR SCHEDULING If multiple CPUs are available, the scheduling problem becomes more complex. Two approaches: Asymmetric Multiprocessing :The basic idea is: • A master server is a single processor responsible for all scheduling decisions, I/O processing and other system activities. • The other processors execute only user code. Advantage: This is simple because only one processor accesses the system data structures, reducing the need for data sharing.
- 39. Symmetric Multiprocessing The basic idea is: • Each processor is self-scheduling. • To do scheduling, the scheduler for each processor Examines the ready-queue and Selects a process to execute. Restriction: We must ensure that two processors do not choose the same process and that processes are not lost from the queue.
- 40. Processor Affinity In SMP systems, Migration of processes from one processor to another are avoided and Instead processes are kept running on same processor. This is known as processor affinity. Two forms 1. SoftAffinity • When an OS try to keep a process on one processor because of policy, but cannot guarantee it will happen • It is possible for a process to migrate between processors. 2. Hard Affinity • When an OS have the ability to allow a process to specify that it is not to migrate to other processors. Eg: Solaris OS
- 41. Load Balancing • This attempts to keep the workload evenly distributed across all processors in an SMP system. Two approaches: 1. Push Migration • A specific task periodically checks the load on each processor and if it finds an imbalance, it evenly distributes the load to idle processors. 2. Pull Migration • An idle processor pulls a waiting task from a busy processor
- 42. Symmetric Multicore processors The basic idea: 1. Create multiple logical processors on the same physical processor. 2. Present a view of several logical processors to the OS. • Each logical processor has its own architecture state, which includes general- purpose and machine-state registers. • Each logical processor is responsible for its own interrupt handling. • SMT is a feature provided in hardware, not software.
- 43. • Multicore processors may complicate Scheduling issues. when processor accesses memory, it spend a significant amount of time waiting for data to become available. This situation known as memory stall. • This may occur for many reason, such as cache miss, i.e accessing data that are not in cache memory. • In this scenario the processor can spend 50 percent of its time waiting for data to become available from memory.
- 45. • To remedy this situation, h/w design implemented multithreaded processor core in which two(or more) hard ware threads are assigned to each core. If one thread stalls while waiting for memory, the core can switch to another thread. In general two ways to multithread a processing core: coarse grained and fine-grained multithreading. CGM thread executes on a processor until a long- latency event such as a memory stall occurs. Cz of delay caused by long latency event the processor must switch to another thread to begin execution, since the instruction pipeline must be flushed before the other thread can begin execution on the processor core FGM switches between threads at a much finer level of granularity- typically at boundary of instruction cycle.
- 46. Real time CPU scheduling System model CPU scheduling for real-time operating systems involves special issues. There are 2 major types of systems: • Soft real time systems — They provide no guarantee as to when a critical real-time process will be scheduled. They guarantee only that the process will be given preference over noncritical processes. • Hard real time systems — They have stricter requirements. A task must be serviced by its deadline; service after the deadline has expired is the same as no service at all.
- 47. Minimising Latency Event latency refers to the amount of time that elapsed between the event occurring and when it is serviced. Different events may have different latency requirements.
- 48. There are 2 types of latency which affect real time systems. They are - • Interrupt Latency • Dispatch Latency Interrupt latency refers to the period of time from the arrival of an interrupt at the CPU to the start of the routine that services the interrupt. When an interrupt occurs, the operating system must first complete the instruction it is executing and determine the type of interrupt that occurred. It must then save the state of the current process before servicing the interrupt using the specific interrupt service routine (ISR). The total time required to perform these tasks is the interrupt latency.
- 50. One important factor contributing to interrupt latency is the amount of time interrupts may be disabled while kernel data structures are being updated. Real-time operating systems require that interrupts be disabled for only very short periods of time. • Dispatch latency is the amount of time required by the scheduling dispatcher to stop one process and start another. The most effective technique for keeping dispatch latency low is to provide preemptive kernels.
- 51. The below figure illustrates the dispatch latency:
- 52. The conflict phase in dispatch latency has 2 parts: • Preemption of any process running in the kernel. • Release by low-priority processes of resources needed by a high-priority process Let us now see different types of scheduling.
- 53. • Real time systems are required to immediately respond to a real time process. As a result it needs to support a priority based scheduling algorithm with preemption. Since it is priority based each process must be assigned a priority and since it is preemptive, a process currently running on the CPU will be preempted if a higher-priority process becomes available to run. • We have already discussed preemptive priority based scheduling in previous blogs. Most OS give the highest priority to real time processes. A preemptive priority based scheduler only provides soft real time functionality. We need other considerations for hard real time systems. • First we need to discuss a few terms for further discussion. We assume the processes to be periodic. This means that they require CPU at constant intervals.
- 54. Periodic based Scheduling Processes in this type of scheduling may sometimes have to announce its deadline requirements to the scheduler. Then using an admission-control algorithm, the scheduler does one of two things. It either admits the process, guaranteeing that the process will complete on time, or rejects the request as impossible if it cannot guarantee that the task will be serviced by its deadline.
- 55. • The processor are considered periodic, they require the CPU at constant interval(periodic). • Once periodic has process has acquired the CPU, it has fixed processing time t. • A deadline d by which it must be served by the CPU and a periodic p. • The relationship of processing time, the deadline and periodic as 0≤t≤d≤p.
- 56. Rate Monotonic Scheduling • The rate-monotonic scheduling algorithm schedules periodic tasks using a static priority policy with preemption. If a lower-priority process is running and a higher-priority process becomes available to run, it will preempt the lower-priority process. • Upon entering the system, each periodic task is assigned a priority inversely based on its period. The shorter the period, the higher the priority; the longer the period, the lower the priority.
- 57. • Let us now consider 2 processes, P1 and P2. The time period of each is 50 and 100 respectively (p1 = 50 & p2 = 100). We also consider the processing time to be 20 and 35 respectively (t1 = 20 & t2 = 35). The deadline for each process requires that it complete its CPU burst by the start of its next period. • Suppose we assign P2 a higher priority than P1. As we can see, P2 starts execution first and completes at time 35. At this point, P1 starts; it completes its CPU burst at time 55. However, the first deadline for P1 was at time 50, so the scheduler has caused P1 to miss its deadline.
- 58. But if we were to use Rate Monotonic Scheduling, P1 has a higher priority than P2 because the period of P1 is shorter than that of P2. P1 starts first and completes its CPU burst at time 20, thereby meeting its first deadline. P2 starts running at this point and runs until time 50. At this time, it is preempted by P1, although it still has 5 milliseconds remaining in its CPU burst. P1 completes its CPU burst at time 70, at which point the scheduler resumes P2. P2 completes its CPU burst at time 75, also meeting its first deadline. The system is idle until time 100, when P1 is scheduled again.
- 59. • Rate-monotonic scheduling is considered optimal in that if a set of processes cannot be scheduled by this algorithm, it cannot be scheduled by any other algorithm that assigns static priorities. • Despite being optimal, then, rate-monotonic scheduling has a limitation: CPU utilization is bounded, and it is not always possible fully to maximise CPU resources. The worst-case CPU utilisation for scheduling N processes is N(2N^1/2 — 1).
- 60. Earliest Deadline First Scheduling Earliest-deadline-first (EDF) scheduling dynamically assigns priorities according to deadline. The earlier the deadline, the higher the priority and the later the deadline, the lower the priority. Under the EDF policy, when a process becomes runnable, it must announce its deadline requirements to the system. Priorities may have to be adjusted to reflect the deadline of the newly runnable process.
- 61. Let us again consider the processes that we have seen above (p1 = 50, p2 = 80, t1 = 25, t2 = 35). Process P1 has the earliest deadline, so its initial priority is higher than that of process P2. Process P2 begins running at the end of the CPU burst for P1. However, whereas rate monotonic scheduling allows P1 to preempt P2 at the beginning of its next period at time 50, EDF scheduling allows process P2 to continue running. P2 now has a higher priority than P1 because its next deadline (at time 80) is earlier than that of P1 (at time 100). Thus, both P1 and P2 met their first deadlines. Process P1 again begins running at time 60 and completes its second CPU burst at time 85, also meeting its second deadline at time 100. P2 begins running at this point, only to be preempted by P1 at the start of its next period at time 100. P2 is preempted because P1 has an earlier deadline (time 150) than P2 (time 160). At time 125, P1 completes its CPU burst and P2 resumes execution, finishing at time 145 and meeting its deadline as well. The system is idle until time 150, when P1 is scheduled to run once again.
- 62. Unlike the rate-monotonic algorithm, EDF scheduling does not require that processes be periodic, nor must a process require a constant amount of CPU time per burst. The only requirement is that a process announce its deadline to the scheduler when it becomes runnable.
- 63. Proportional Share Scheduling • Proportional share schedulers operate by allocating T shares among all applications. An application can receive N shares of time, thus ensuring that the application will have N/T of the total processor time. • As an example, assume that a total of T = 100 shares is to be divided among three processes, A, B, and C. A is assigned 50 shares, B is assigned 15 shares, and C is assigned 20 shares. This scheme ensures that A will have 50 percent of total processor time, B will have 15 percent, and C will have 20 percent. • Proportional share schedulers must work in conjunction with an admission-control policy to guarantee that an application receives its allocated shares of time. An admission-control policy will admit a client requesting a particular number of shares only if sufficient shares are available.
- 64. POSIX Real-Time Scheduling • POSIX defines two scheduling classes for real time threads – SCHED_FIFO – SCHED_RR 1.SCHED_FIFO Scheduling thread according to first come , first- served policy using FIFO queue, there is no time slicing among threads of equal priority. • Therefore , the highest priority real time threads at the front of FIFO queue will be granted the CPU until it terminated or blocked. 2. SCHED_RR uses a round robin policy. It is similar to SCHED_FIFO expect that provides time slicing among threads of equal priority. 3. POSIX provides an additional scheduling class SCHED_OTHER but its implementation is undefined and system specific, it may behave differently on different systems.
- 65. Quiz Time • T shares of time are allocated among all processes out of N shares in __________ scheduling algorithm. a) rate monotonic b) proportional share c) earliest deadline first d) none of the mentioned • Earliest deadline first algorithm assigns priorities according to ____________ a) periods b) deadlines c) burst times d) none of the mentioned • A process P1 has a period of 50 and a CPU burst of t1 = 25, P2 has a period of 80 and a CPU burst of 35., can the two processes be scheduled using the EDF algorithm without missing their respective deadlines? a) Yes b) No c) Maybe d) None of the mentioned
- 66. Wrap Up (Conclusion) • In this blog, we learnt what precisely is meant by Real-time CPU Scheduling, as well as different ways for scheduling the same, and we saw some crucial words that you need know before we can make real-life systems and use all of these ideas. • From the next blog, we will be focused on some research subjects in CPU Scheduling, which is the most exciting aspect of this entire blog series.