CUG2011 Introduction to GPU Computing
2 likes1,350 views

This document provides an introduction to GPU computing. It discusses the architectural differences between CPUs and GPUs and when each is better suited for certain tasks. It also overview several GPU programming models such as CUDA, OpenCL, and directives. Finally, it discusses approaches for analyzing GPU performance, including using explicit events, the CUDA profiler, and CrayPAT tools.



















![CUDA C Example
Host Code GPU Code
Allocate &
double a[1000], *d_a;
dim3 block( 1000, 1, 1 ); Copy to GPU __global__
dim3 grid( 1, 1, 1 );
void scaleit_kernel(double *a,int n)
cudaMalloc((void**)&d_a, 1000*sizeof(double));
cudaMemcpy(d_a, a,
{
1000*sizeof(double),cudaMemcpyHostToDev
ice);
int i = threadIdx.x; My Index
scaleit_kernel<<<grid,block>>>(d_a,n); Launch
cudaMemcpy(a, d_a,
if (i < n)
Calculate
1000*sizeof(double),cudaMemcpyDeviceToH
ost);
a[i] = a[i] * 2.0l; Myself
cudaFree(d_a);
}
Copy Back & Free](https://image.slidesharecdn.com/larkintutorial-110523100034-phpapp01/85/CUG2011-Introduction-to-GPU-Computing-20-320.jpg)








![CUDA Profiler Example
# Enable Profiler
$ export CUDA_PROFILE=1
$ aprun ./a.out
$ cat cuda_profile_0.log
# CUDA_PROFILE_LOG_VERSION 2.0
# CUDA_DEVICE 0 Tesla M2090
# TIMESTAMPFACTOR fffff6f3e9b1f6c0
method,gputime,cputime,occupancy
method=[ memcpyHtoD ] gputime=[ 2.304 ] cputime=[ 23.000 ]
method=[ _Z14scaleit_kernelPdi ] gputime=[ 4.096 ] cputime=[
15.000 ] occupancy=[ 0.667 ]
method=[ memcpyDtoH ] gputime=[ 3.072 ] cputime=[ 34.000 ]](https://image.slidesharecdn.com/larkintutorial-110523100034-phpapp01/85/CUG2011-Introduction-to-GPU-Computing-31-320.jpg)
![CUDA Profiler Example
# Customize Experiment
$ cat exp.txt
l1_global_load_miss
l1_global_load_hit
$ export CUDA_PROFILE_CONFIG=exp.txt
$ aprun ./a.out
$ cat cuda_profile_0.log
# CUDA_PROFILE_LOG_VERSION 2.0
# CUDA_DEVICE 0 Tesla M2090
# TIMESTAMPFACTOR fffff6f4318519c8
method,gputime,cputime,occupancy,l1_global_load_miss,l1_global_load_hit
method=[ memcpyHtoD ] gputime=[ 2.240 ] cputime=[ 23.000 ]
method=[ _Z14scaleit_kernelPdi ] gputime=[ 4.000 ] cputime=[ 36.000 ]
occupancy=[ 0.667 ] l1_global_load_miss=[ 63 ] l1_global_load_hit=[
0 ]
method=[ memcpyDtoH ] gputime=[ 3.008 ] cputime=[ 33.000 ]](https://image.slidesharecdn.com/larkintutorial-110523100034-phpapp01/85/CUG2011-Introduction-to-GPU-Computing-32-320.jpg)





![Calculating Occupancy
1. Get the register count
ptxas info : Compiling entry function
'laplace_sphere_wk_kernel3' for 'sm_20'
ptxas info : Used 36 registers, 7808+0 bytes
smem, 88 bytes cmem[0], 768 bytes cmem[2]
2. Get the thread decomposition
blockdim = dim3( 4, 4, 26)
griddim = dim3(101, 16, 1)
3. Enter into occupancy calculator
Result: 54%](https://image.slidesharecdn.com/larkintutorial-110523100034-phpapp01/85/CUG2011-Introduction-to-GPU-Computing-40-320.jpg)











![Simple Matrix Multiply
ptxas info : Compiling entry
attributes(global)&
subroutine mm1_kernel(C,A,B,N)
function 'mm1_kernel' for
integer, value, intent(in) :: N 'sm_20'
real(8), intent(in) ::
ptxas info : Used 22
A(N,N),B(N,N)
real(8), intent(inout) :: C(N,N) registers, 60 bytes cmem[0]
integer i,j,k
real(8) :: val
• No shared memory use,
i = (blockIdx%x - 1) * blockDim%x totally relies on
+ threadIdx%x
j = (blockIdx%y - 1) * blockDim%y
+ threadIdx%y
hardware L1
val = C(i,j) Kernel Time (ms) Occupancy
do k=1,N
val = val + A(i,k) * B(k,j) Simple 269.0917 67%
enddo
C(i,j) = val
end](https://image.slidesharecdn.com/larkintutorial-110523100034-phpapp01/85/CUG2011-Introduction-to-GPU-Computing-52-320.jpg)
![Tiled Matrix Multiply
ptxas info : Compiling entry
integer,parameter :: M = 32
real(8),shared :: AS(M,M),BS(M,M) function 'mm2_kernel' for
real(8) :: val 'sm_20'
val = C(i,j) ptxas info : Used 18
registers, 16384+0 bytes
do blk=1,N,M
AS(threadIdx%x,threadIdx%y) = & smem, 60 bytes cmem[0], 4
A(blk+threadIdx%x-1,blk+threadIdx%y-1) bytes cmem[16]
BS(threadIdx%x,threadIdx%y) = &
B(blk+threadIdx%x-1,blk+threadIdx%y-1)
call syncthreads() • Now uses 16K of shared
do k=1,M
val = val + AS(threadIdx%x,k) &
memory
* BS(k,threadIdx%y)
enddo Kernel Time (ms) Occupancy
call syncthreads()
enddo Simple 269.0917 67%
C(i,j) = val
endif
Tiled 213.7160 67%](https://image.slidesharecdn.com/larkintutorial-110523100034-phpapp01/85/CUG2011-Introduction-to-GPU-Computing-53-320.jpg)










CUG2011 Introduction to GPU Computing
- 1. Introduction to GPU Computing Jeff Larkin Cray Supercomputing Center of Excellence [email protected]
- 2. Goals for this tutorial • Understand the architectural differences between GPUs and CPUs and the associated trade-offs • Recognize several GPU programming models and how/when to use each • Understand how to analyze GPU performance • Recognize very basic GPU optimizations
- 3. This tutorial is not… • A deep-dive on GPU programming • The be all and end all on GPU optimization • A recipe for getting 10, 100, 1000X speed-ups for your application
- 5. Section Goals • Recognize the differences between CPU/GPU architectures • Identify when one architecture may be better suited than the other.
- 6. CPU/GPU Architectures CPU GPU ALU ALU Control ALU Control ALU ALU ALU Cache Cache Cache Cache RAM RAM
- 7. CPU/GPU Architectures CPU GPU • Large memory, directly • Relatively small memory, accessible must be managed by CPU • Each core has own, • Groups of compute cores independent control logic share control logic – Allows independent – Saves space, power, … execution • Shared cache & • Coherent caches between synchronization within cores groups – Can share & synchronize – None between groups
- 8. Play to your strengths CPU GPU • Tuned for serial execution • Tuned for highly parallel with short vectors execution • Multiple independent • Threads work in lockstep threads of execution within groups – Much like vectors • Branch-prediction • Serializes branchy code • Memory latency hidden by • Memory latency hidden by cache & prefetching swapping away stalled – Requires regular data access threads patterns – Requires 1000s of concurrent threads
- 9. GPU Glossary Hardware Software (CUDA) Core Thread/Work Unit Streaming Multiprocessor (SM) Thread Block/Work Group • A Grid is a group of related Thread Blocks running the same kernel • A Warp is Nvidia’s term for 32 Threads running in lock-step • Warp Diversion is what happens when some threads within a warp stall due to a branch • Shared Memory is a user-managed cache within a Thread Block • Occupancy is the degree to which all of the GPU hardware can be used in a Kernel – Heavily influenced by registers/thread and threads/block • Stream is a series of data transfers and kernel launches that happen in series
- 11. Section Goals • Introduce several GPU programming models • Discuss why someone may choose one programming paradigm over the others.
- 12. Explicit/Implicit GPU Programming Explicit Implicit • Bottom-up approach • Traditional Top-down • Explicit Kernel written from programming threads’ perspective – Big Picture • Memory management • Compiler handles memory controlled by programmer and thread management – May be guided by • Thread Blocks & Grid programmer defined by programmer • CPU & GPU may use the • GPU code usually distinct same code from CPU code – Easier code maintenance
- 13. GPU Programming Models • Explicit – CUDA C (Free from Nvidia) – CUDA Fortran (Commercial from PGI) – OpenCL (Free from Multiple Vendors) • Implicit – Proposed OpenMP Directives (Multiple Vendors) – PGI Directives (Commercial from PGI) – HMPP Directives (Commercial from CAPS) – Libraries (CUBLAS, MAGMA, etc.)
- 14. Multi-node Programming • GPU papers & tutorials usually focus on 1 node, what about the rest of the machine? • High-level MPI parallelism between nodes – You’re probably already doing this • Loose, on-node parallelism via threads – Most codes today are using MPI, but threading is becoming more important • Tight, on-node, vector parallelism – SSE/AVX on CPUs – GPU threaded parallelism Programmers need to expose the same parallelism with/without GPUs
- 15. Using the Machine Efficiently So-So Hybridization Better Hybridization MPI MPI MPI MPI CPU 0 CPU 1 G0 0 1 2 3 G1 0 1 2 3 Time GPU 0 GPU 1 MPI MPI CPU 0 CPU 1 MPI MPI • Overlap CPU/GPU work and CPU 0 CPU 1 data movement. • Neglects the CPU • Even better if you can • Suffers from Amdahl’s Law overlap communication too!
- 16. Original S3D RHS – Called 6 times for each time step – Runge Kutta iterations Calculate Primary Variable – point wise All major loops are at low level of the Mesh loops within 5 different routines Call tree Green – major computation – point-wise Yellow – major computation – Halos 5 zones Perform Derivative computation – High thick order differencing Calculate Diffusion – 3 different routines with some derivative computation Perform Derivative computation for forming rhs – lots of communication Perform point-wise chemistry computation 5/24/2011 16
- 17. Restructured S3D for multi-core systems RHS – Called 6 times for each time step – Runge Kutta iterations Calculate Primary Variable – point wise OMP loop over grid Mesh loops within 3 different routines Perform Derivative computation – High order differencing Calculate Primary Variable – point Overlapped OMP loop over grid wise Mesh loops within 2 different routines Calculate Diffusion – 3 different routines with some derivative computation Perform derivative computation Overlapped OMP loop over grid Perform point-wise chemistry computation (1) Perform Derivative computation for forming rhs – lots of communication Overlapped OMP loop over grid Perform point-wise chemistry computation (2) 5/24/2011
- 18. The Hybridization of S3D 5/24/2011 18
- 19. Explicit: CUDA C/Fortran & OpenCL • Programmer writes a kernel in C/Fortran that will be run on the GPU – This is essentially the loop body from original CPU code • GPU memory must be explicitly allocated, freed, and filled from CPU memory over PCIe – Generally results in 2 variables referring to every pertinent array, one in each memory domain (hostA, devA) • Programmer declares how to decompose into thread blocks and grid – Must understand limits of thread block size and how to maximize occupancy • CPU code launches kernel on device. – May continue to work while GPU executes kernel(s)
- 20. CUDA C Example Host Code GPU Code Allocate & double a[1000], *d_a; dim3 block( 1000, 1, 1 ); Copy to GPU __global__ dim3 grid( 1, 1, 1 ); void scaleit_kernel(double *a,int n) cudaMalloc((void**)&d_a, 1000*sizeof(double)); cudaMemcpy(d_a, a, { 1000*sizeof(double),cudaMemcpyHostToDev ice); int i = threadIdx.x; My Index scaleit_kernel<<<grid,block>>>(d_a,n); Launch cudaMemcpy(a, d_a, if (i < n) Calculate 1000*sizeof(double),cudaMemcpyDeviceToH ost); a[i] = a[i] * 2.0l; Myself cudaFree(d_a); } Copy Back & Free
- 21. CUDA Fortran Example Host Code GPU Code subroutine scaleit(a,n) attributes(global)& real(8),intent(inout) :: a(n) Declare on subroutine scaleit_kernel(a,n) real(8),device :: d_a(n) Device real(8),intent(inout) :: a(n) integer,intent(in) :: n type(dim3) :: blk, grd integer,intent(in),value :: n integer I blk = dim3(1000,1,1) grd = dim3(1,1,1) i = threadIdx%x My Index d_a = a Copy To Device call scaleit_kernel<<<grd,blk>>>(d_a,n) if (i.le.n) then Calculate a = d_a a(i) = 2.0 * a(i) Myself end subroutine scaleit Launch & Copy endif Back end subroutine scaleit_kernel
- 22. Implicit: Directives • Programmer adds directives to existing CPU code • Compiler determines – Memory management – Thread management • Programmer adds directives to guide compiler – Higher-level data regions – Partial array updates – Improved thread blocking
- 23. Proposed OpenMP Directives Example real*8 a(1000) integer i Build for device, Copy a on and off !$omp acc_region_loop acc_copy(a) do i=1,1000 a(i) = 2 * a(i) enddo !$omp end acc_region_loop
- 24. Implicit: Libraries • Calls to existing Math libraries replaced with accelerated libraries – BLAS, LAPACK – FFT – Sparse kernels • Unless application spends very high % of runtime in library calls, this will need to be combined with other methods
- 25. Libraries Example info = cublas_set_matrix(lda, na, sizeof_Z, a, lda, devA, lda) info = cula_device_zgetrf(m,m,devA+idx2f(ioff+1,ioff+1,lda)*sizeof_Z,lda,devIPVT) info = cula_device_zgetrs('n',m,ioff,devA+idx2f(ioff+1,ioff+1,lda)*sizeof_Z,lda,devIPVT, & devA+idx2f(ioff+1,1,lda)*sizeof_Z,lda) call cublas_zgemm('n','n',n,ioff-k+1,na-ioff,cmone,devA+idx2f(joff+1,ioff+1,lda)*sizeof_Z,lda, & devA+idx2f(ioff+1,k,lda)*sizeof_Z,lda,cone,devA+idx2f(joff+1,k,lda)*sizeof_Z,lda) call cublas_zgemm('n','n',blk_sz(1),blk_sz(1)-k+1,na-blk_sz(1), & cmone,devA+idx2f(1,blk_sz(1)+1,lda)*sizeof_Z,lda, & devA+idx2f(blk_sz(1)+1,k,lda)*sizeof_Z,lda,cone,devA,lda) info = cublas_get_matrix(lda, na, sizeof_Z, devA, lda, a, lda)
- 27. Section Goals • Understand multiple options for gathering GPU performance metrics • Increasing number of tools available, I’ll cover 3 methods – Explicit event instrumentation – CUDA Profiler – CrayPAT Preview
- 28. CUDA Event API • Most CUDA API calls are asynchronous: explicit CPU timers won’t work • CUDA allows inserting events into the stream – Insert an event before and after what needs to be timed – Synchronize with events – Calculate time between events • Introduces small driver overhead and may synchronize asynchronous calls – Don’t use in production
- 29. CUDA Event Example Event st0 Allocate ierr = cudaEventRecord(st0,0) Event st1 allocate(d_a(n)) ierr = cudaEventRecord(st1,0) Copy-in d_a = a ierr = cudaEventRecord(st2,0) Event st2 call & scaleit_kernel<<<grd,blk>>>& (d_a,n) Run Kernel ierr = cudaEventRecord(st3,0) a = d_a Event st3 ierr = cudaEventRecord(st4,0) deallocate(d_a) Copy-out ierr = cudaEventRecord(st5,0) ... Event st4 ierr = cudaEventSynchronize(st2) Deallocate ierr = cudaEventSynchronize(st3) ierr = cudaEventElapsedTime & Event st5 (et, st2, st3) Synchronize write(*,*)‘Kernel Time',et
- 30. CUDA Profiler • Silently built-in to CUDA driver and enabled via environment variable – Works with both CUDA and Directives programs • Returns time of memory copies and kernel launches by default – Also reports kernel occupancy – Can be configured to report many other metrics • All metrics are recorded at driver level and high resolution – May add small kernel overhead and synchronize asynchronous operations.
- 31. CUDA Profiler Example # Enable Profiler $ export CUDA_PROFILE=1 $ aprun ./a.out $ cat cuda_profile_0.log # CUDA_PROFILE_LOG_VERSION 2.0 # CUDA_DEVICE 0 Tesla M2090 # TIMESTAMPFACTOR fffff6f3e9b1f6c0 method,gputime,cputime,occupancy method=[ memcpyHtoD ] gputime=[ 2.304 ] cputime=[ 23.000 ] method=[ _Z14scaleit_kernelPdi ] gputime=[ 4.096 ] cputime=[ 15.000 ] occupancy=[ 0.667 ] method=[ memcpyDtoH ] gputime=[ 3.072 ] cputime=[ 34.000 ]
- 32. CUDA Profiler Example # Customize Experiment $ cat exp.txt l1_global_load_miss l1_global_load_hit $ export CUDA_PROFILE_CONFIG=exp.txt $ aprun ./a.out $ cat cuda_profile_0.log # CUDA_PROFILE_LOG_VERSION 2.0 # CUDA_DEVICE 0 Tesla M2090 # TIMESTAMPFACTOR fffff6f4318519c8 method,gputime,cputime,occupancy,l1_global_load_miss,l1_global_load_hit method=[ memcpyHtoD ] gputime=[ 2.240 ] cputime=[ 23.000 ] method=[ _Z14scaleit_kernelPdi ] gputime=[ 4.000 ] cputime=[ 36.000 ] occupancy=[ 0.667 ] l1_global_load_miss=[ 63 ] l1_global_load_hit=[ 0 ] method=[ memcpyDtoH ] gputime=[ 3.008 ] cputime=[ 33.000 ]
- 33. CrayPAT Prototype • Luiz DeRose is giving a tutorial on CrayPAT future work at CUG (you’re missing it right now) • The goal of the CrayPAT team is to make instrumenting applications and understanding the results as simple as possible – No code modification – Derived metrics – Optimization suggestions – … • Several new tools are being developed that will help with accelerator development
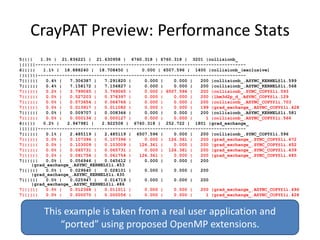
- 34. CrayPAT Preview: Performance Stats 5|||| 1.3% | 21.836221 | 21.630958 | 6760.318 | 6760.318 | 3201 |collisionb_ ||||||------------------------------------------------------------------------------- 6||||| 1.1% | 18.888240 | 18.708450 | 0.000 | 6507.596 | 1400 |collisionb_(exclusive) |||||||------------------------------------------------------------------------------ 7|||||| 0.4% | 7.306387 | 7.291820 | 0.000 | 0.000 | 200 |[email protected] 7|||||| 0.4% | 7.158172 | 7.156827 | 0.000 | 0.000 | 200 |[email protected] 7|||||| 0.2% | 3.799065 | 3.799065 | 0.000 | 6507.596 | 200 |[email protected] 7|||||| 0.0% | 0.527203 | 0.376397 | 0.000 | 0.000 | 200 |[email protected] 7|||||| 0.0% | 0.073654 | 0.064766 | 0.000 | 0.000 | 200 |[email protected] 7|||||| 0.0% | 0.013917 | 0.011082 | 0.000 | 0.000 | 199 |[email protected] 7|||||| 0.0% | 0.009707 | 0.008366 | 0.000 | 0.000 | 200 |[email protected] 7|||||| 0.0% | 0.000134 | 0.000127 | 0.000 | 0.000 | 1 |[email protected] 6||||| 0.2% | 2.947981 | 2.922508 | 6760.318 | 252.722 | 1801 |grad_exchange_ |||||||------------------------------------------------------------------------------ 7|||||| 0.1% | 2.485119 | 2.485119 | 6507.596 | 0.000 | 200 |[email protected] 7|||||| 0.0% | 0.107396 | 0.107396 | 0.000 | 126.361 | 200 |[email protected] 7|||||| 0.0% | 0.103009 | 0.103009 | 126.361 | 0.000 | 200 |[email protected] 7|||||| 0.0% | 0.065731 | 0.065731 | 0.000 | 126.361 | 200 |[email protected] 7|||||| 0.0% | 0.061754 | 0.061754 | 126.361 | 0.000 | 200 |[email protected] 7|||||| 0.0% | 0.056946 | 0.045612 | 0.000 | 0.000 | 200 |[email protected] 7|||||| 0.0% | 0.029640 | 0.028101 | 0.000 | 0.000 | 200 |[email protected] 7|||||| 0.0% | 0.025947 | 0.014719 | 0.000 | 0.000 | 200 |[email protected] 7|||||| 0.0% | 0.012368 | 0.011011 | 0.000 | 0.000 | 200 |[email protected] 7|||||| 0.0% | 0.000070 | 0.000056 | 0.000 | 0.000 | 1 |[email protected] This example is taken from a real user application and “ported” using proposed OpenMP extensions.
- 35. CrayPAT Preview: Data Transfer Stats Host | Host Time | Acc Time | Acc Copy | Acc Copy | Calls |Group='ACCELERATOR' Time % | | | In (MB) | Out (MB) | | PE 100.0% | 42.763019 | 42.720514 | 21877.192 | 20076.420 | 703 |Total |----------------------------------------------------------------------------------- | 100.0% | 42.763019 | 42.720514 | 21877.192 | 20076.420 | 703 |ACCELERATOR ||---------------------------------------------------------------------------------- 5|||| 4.6% | 31.319188 | 31.318755 | 19425.659 | 19425.659 | 140 |recolor_ ||||||------------------------------------------------------------------------------ 6||||| 4.5% | 30.661050 | 30.660616 | 18454.376 | 19425.659 | 139 |recolor_(exclusive) |||||||----------------------------------------------------------------------------- 7|||||| 2.4% | 16.761967 | 16.761967 | 0.000 | 19425.659 | 20 |[email protected] 7|||||| 1.9% | 13.227889 | 13.227889 | 18454.376 | 0.000 | 19 |[email protected] 7|||||| 0.1% | 0.668515 | 0.668480 | 0.000 | 0.000 | 20 |[email protected] 7|||||| 0.0% | 0.002122 | 0.002059 | 0.000 | 0.000 | 20 |[email protected] 7|||||| 0.0% | 0.000332 | 0.000105 | 0.000 | 0.000 | 20 |[email protected] 7|||||| 0.0% | 0.000116 | 0.000057 | 0.000 | 0.000 | 20 |[email protected] 7|||||| 0.0% | 0.000110 | 0.000060 | 0.000 | 0.000 | 20 |[email protected] |||||||============================================================================= 6||||| 0.1% | 0.658138 | 0.658138 | 971.283 | 0.000 | 1 |streaming_exchange_ 7||||| | | | | | | [email protected] ||||||============================================================================== Full PCIe data transfer information without any code modifications.
- 36. Cray Tools: More Information • Cray is developing a lot of tools that deserve more time than this tutorial allows, so… • Go to “Cray GPU Programming Tools” BOF at 4:15 on Wednesday (Track 15B) • Talk to Luiz DeRose and/or Heidi Poxon while you’re here.
- 39. Calculating Occupancy • Occupancy is the degree to which the hardware is saturated by your kernel – Generally higher occupancy results in higher performance • Heavily affected by – Thread decomposition – Register usage – Shared memory use • Nvidia provides an “occupancy calculator” spreadsheet as part of the SDK – Live example to follow
- 40. Calculating Occupancy 1. Get the register count ptxas info : Compiling entry function 'laplace_sphere_wk_kernel3' for 'sm_20' ptxas info : Used 36 registers, 7808+0 bytes smem, 88 bytes cmem[0], 768 bytes cmem[2] 2. Get the thread decomposition blockdim = dim3( 4, 4, 26) griddim = dim3(101, 16, 1) 3. Enter into occupancy calculator Result: 54%
- 41. Improving the Results Reducing registers per Varying #threads or thread may increase shared memory use has occupancy. little effect
- 42. Reducing Registers/Thread • Maximum number of registers/thread can be set via compiler flag • Reducing the number of registers/thread to 18 increases occupancy to 81% • Time Before: 924us • Time After: 837us • Improvement: ~10% • Occupancy isn’t a silver bullet
- 43. Occupancy Case Study • Results from a Finite Difference Kernel, provided by Paulius Micikevicius of Nvidia • Default compilation – 46 registers, no spills to lmem – runs a single 32x16 threadblock per SM concurrently – Occupancy: 33% – 3,395 MCells/s throughput (39.54ms)
- 44. Occupancy Case Study cont. • Reducing Maximum Registers to 32 – Set maximum register count via compiler flag – 32 registers, 44 bytes spilled to lmem – runs two 32x16 threadblocks per SM concurrently – Occupancy: 67% – 4,275 MCells/s (31.40ms) • Improvement: ~26%
- 46. Asynchronous Execution • Most GPU Operations are Asynchronous from the CPU code – Hint: The CPU can be busy doing other things • Current Hardware can handle 1 Copy-in, 1 Kernel, and 1 Copy-out simultaneous, if in separate streams – Hint: Data transfer costs can be hidden by running multiple streams and asynchronous tranfers
- 47. Asynchronous Execution with Streams • Synchronous Execution (1 Stream): In Run Out In Run Out In Run Out In Run Out • Asynchronous Execution (3 Streams): In Run Out In Run Out In Run Out In Run Out • If data cannot remain resident on device, streaming may allow GPU to offset transfer costs
- 48. Asynchronous Execution: Example • Add some number of streams to integer :: streams(3) existing code integer :: ierr,j,mystream • Use Asynchronous memory copies to copy part of data to/from device do j=1,3 ierr = cudaStreamCreate(streams(j)) – GOTCHA: Host arrays must be enddo “pinned” in order to use Async copies do j=1,m • Add stream parameter to kernel mystream = mod(j,3) launch ierr = cudaMemcpyAsync& (d_a(:,j),a(:,j),size(a(:,j)),streams(mystream)) call • Sync Time: 0.6987200 scaleit_kernel<<<grd,blk,0,streams(mystrea m)>>>(d_a(:,j),n) • Async Time: 0.2472000 ierr = cudaMemcpyAsync& (a(:,j),d_a(:,j),size(a(:,j)),streams(mystream)) enddo ierr = cudaStreamSynchronize(streams(1)) ierr = cudaStreamSynchronize(streams(2)) ierr = cudaStreamSynchronize(streams(3))
- 49. Asynchronous Case Study CAVEAT: The above kernel over-emphasizes data transfer, thus necessitating streaming.
- 51. Shared Memory • Much like CPU cache, shared memory is much faster than global memory (up to 100X lower latency) – Staging Area – Scratch Pad • 64KB Shared Memory sits on each SM – With Fermi, this is split between User-Manager and L1: 48/16 or 16/48 – Split can be determined kernel to kernel • If data is shared between threads in a thread block or reused well, staging it into shared memory may be beneficial – Think: Cache Prefetching
- 52. Simple Matrix Multiply ptxas info : Compiling entry attributes(global)& subroutine mm1_kernel(C,A,B,N) function 'mm1_kernel' for integer, value, intent(in) :: N 'sm_20' real(8), intent(in) :: ptxas info : Used 22 A(N,N),B(N,N) real(8), intent(inout) :: C(N,N) registers, 60 bytes cmem[0] integer i,j,k real(8) :: val • No shared memory use, i = (blockIdx%x - 1) * blockDim%x totally relies on + threadIdx%x j = (blockIdx%y - 1) * blockDim%y + threadIdx%y hardware L1 val = C(i,j) Kernel Time (ms) Occupancy do k=1,N val = val + A(i,k) * B(k,j) Simple 269.0917 67% enddo C(i,j) = val end
- 53. Tiled Matrix Multiply ptxas info : Compiling entry integer,parameter :: M = 32 real(8),shared :: AS(M,M),BS(M,M) function 'mm2_kernel' for real(8) :: val 'sm_20' val = C(i,j) ptxas info : Used 18 registers, 16384+0 bytes do blk=1,N,M AS(threadIdx%x,threadIdx%y) = & smem, 60 bytes cmem[0], 4 A(blk+threadIdx%x-1,blk+threadIdx%y-1) bytes cmem[16] BS(threadIdx%x,threadIdx%y) = & B(blk+threadIdx%x-1,blk+threadIdx%y-1) call syncthreads() • Now uses 16K of shared do k=1,M val = val + AS(threadIdx%x,k) & memory * BS(k,threadIdx%y) enddo Kernel Time (ms) Occupancy call syncthreads() enddo Simple 269.0917 67% C(i,j) = val endif Tiled 213.7160 67%
- 54. What if we increase the occupancy? • With 32x32 blocks, we’ll never get above 67% • Reduce block size from 32x32 to 16x16? Kernel Time (ms) Occupancy Simple (32x32) 269.0917 67% Tiled (32x32) 213.7160 67% Simple (16x16) 371.7050 83% Tiled (16x16) 209.8233 83% • Reduce Max Registers to 18? Kernel Time (ms) Occupancy Simple (16x16) 371.7050 83% Tiled (16x16) 209.8233 83% Simple (16x16) 18 registers 345.7340 100% Tiled (16x16) 18 registers 212.2826 100% • Turns out the 16 is even worse.
- 56. Coalescing Memory Accesses • The GPU will try to load needed memory in as few memory transactions as possible. – 128 B if possible – If not, 2 X 64 B – If not, 64 B may be split to 32 B – Continue until every thread has needed data • Coalescing is possible if: – 128B aligned – All threads access elements in same segment
- 57. Why is coalescing important? • Issuing 1 128B transaction reduces memory latency and better utilizes memory bandwidth • L1/Shared Memory cache lines are 128B – Not using all fetched addresses wastes bandwidth • Nvidia Guide: “Because of this possible performance degradation, memory coalescing is the most critical aspect of performance optimization of device memory.”
- 58. Coalescing Examples Simple, Stride-1: Segment 1 Segment 0 Threads in same warp Every thread accesses memory within same 128B-aligned memory segment, so the hardware will coalesce into 1 transaction.
- 59. Will This Coalesce? Yes! Every thread is still accessing memory within a single 128B segment and segment is 128B aligned. No. Although this is stride-1, it is misaligned, accessing 2 128B segments. 2 64B transactions will result.
- 60. Will This Coalesce? Stride-2, half warp: Yes, but.. • Half of the memory transaction is wasted. • Poor utilization of the memory bus.
- 61. Striding • Striding results in more Striding: Relative Bandwidth 7 memory transactions 6 and wastes cache line entries 5 4 1/Time(s) attributes(global)& subroutine stride_kernel(datin, 3 datout, st) integer,value :: st 2 real(8) :: datin(n), datout(n) integer i 1 i = (blockIdx%x * blockDim%x ) & 0 + (threadIdx%x * st) 0 5 10 15 20 25 30 35 datout(i) = datin(i) end subroutine stride_kernel Stride
- 62. Offsets (Not 128B-aligned) • Memory offsets result Offset: Relative Bandwidth 6 in more memory transactions by crossing 5 segment boundaries 4 1/Time(ms) attributes(global)& 3 subroutine offset_kernel(datin, datout, st) integer,value :: st 2 128B Boundaries real(8) :: datin(n), datout(n) integer i 1 i = (blockIdx%x * blockDim%x ) & 0 + threadIdx%x + st 0 5 10 15 20 25 30 35 datout(i) = datin(i) end subroutine offset_kernel Offset
- 64. On The Web • GTC 2010 Tutorials: http://www.nvidia.com/object/gtc2010- presentation-archive.html • Nvidia CUDA online resources: http://developer.nvidia.com/cuda-education- training • PGI CUDA Fortran: http://www.pgroup.com/resources/cudafortra n.htm