FCN-Based 6D Robotic Grasping for Arbitrary Placed Objects
1 like1,927 views

This document discusses a machine learning-based end-to-end approach for robotic grasping of arbitrarily placed objects, highlighting previous traditional methods' limitations. It introduces a novel strategy for data collection and presents a convolutional neural network model that predicts six-dimensional grasp configurations. Experimental results demonstrate varying success rates in grasping known and unknown objects, with significant emphasis on a designed system test.










FCN-Based 6D Robotic Grasping for Arbitrary Placed Objects
- 1. Hitoshi Kusano*, Ayaka Kume+, Eiichi Matsumoto+, Jethro Tan+ June 2, 2017 *Kyoto University +Preferred Networks, Inc. FCN-Based 6D Robotic Grasping for Arbitrary Placed Objects ※This work is the output of Preferred Networks internship program
- 2. Requirement for successful robotic grasping: Derive configurations of a robot and its end-effector e.g. Grasp pose, Grasp width, Grasp height, Joint angle ・Traditional approach decomposes grasping process into several stages, which require many heuristics ・Machine learning based end-to-end approach has emerged Background http://www.schunk-modular-robotics.com/ 1/9 Complex end-effector Cluttered environment
- 3. None of prior methods can predict 6D grasp Previous Work ~ Machine learning based end-to-end approach ~ Pinto2016 Levine2016 Araki2016 Guo2017 (x, y)height width 2/9 (x, y, z, roll, pitch, yaw)
- 4. Our purpose: End-to-End learning to grasp arbitrary placed objects Contribution: ○ Novel data collection strategy to obtain 6D grasp configurations using a teach tool by human ○ End-to-end CNN model predicting 6D grasp configurations Purpose and Contribution (x, y, z, w, p, r) 3/9
- 5. ● An extension for Fully Convolutional Networks ● Outputs two maps with scores: Location Map for graspability per pixel, and Configuration Map providing end-effector configurations (z, w, p, r) per pixel ● For Configuration Map, this network classifies valid grasp configurations to 300 classes, NOT regression Grasp Configuration Network (x, y, z, w, p, r) 4/9 Location MapConfiguration Map
- 6. Data Collection Simple teach tool Data Collection We demonstrated 11320 grasps for 7 objects 5/9 Robotic Gripper https://www.thk.com X
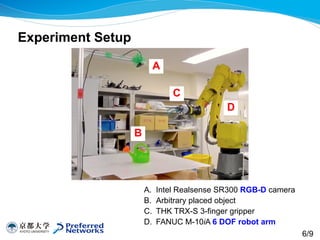
- 7. A. Intel Realsense SR300 RGB-D camera B. Arbitrary placed object C. THK TRX-S 3-finger gripper D. FANUC M-10iA 6 DOF robot arm Experiment Setup B C D A 6/9
- 8. ● Predicted grasp configurations for the same (X,Y) location Example of predicted grasp configurations Cap Bottle TOP VIEW FRONT VIEW Grasp Candidate Grasp Candidate 7/9
- 9. Known Objects Unknown Objects Results of robotic experiment 70% 50% 60% 40% 20% 40% 60% Number under the figure means success rate for 10 trials 60% 20% 20% 40% 30% 8/9 _
- 10. System Test ※This video is double speed 9/9
- 11. Thank you for listening and I hope to talk to you in the interactive session