


























































































































![TÀI LIỆU THAM KHẢO
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH Trang 110
TÀI LIỆU THAM KHẢO
Sách tham khảo
[1] PGS.TS. Nguyễn Hữu Phương, “Mạch số dùng cho sinh viên đại học ngành điện tử, tự
động hóa, viễn thông, tin học, v.v.”, Nhà xuất bản Thống kê, 2004.
[2] Nguyễn Đình Phú, “Vi điều khiển PIC”, Giáo trình trường ĐH Sư Phạm Kỹ Thuật
TP.Hồ Chí Minh, 2016.
[3] Nguyễn Văn Hiệp, “Giáo trình Lập trình Android trong ứng dụng điều khiển”, Nhà xuất
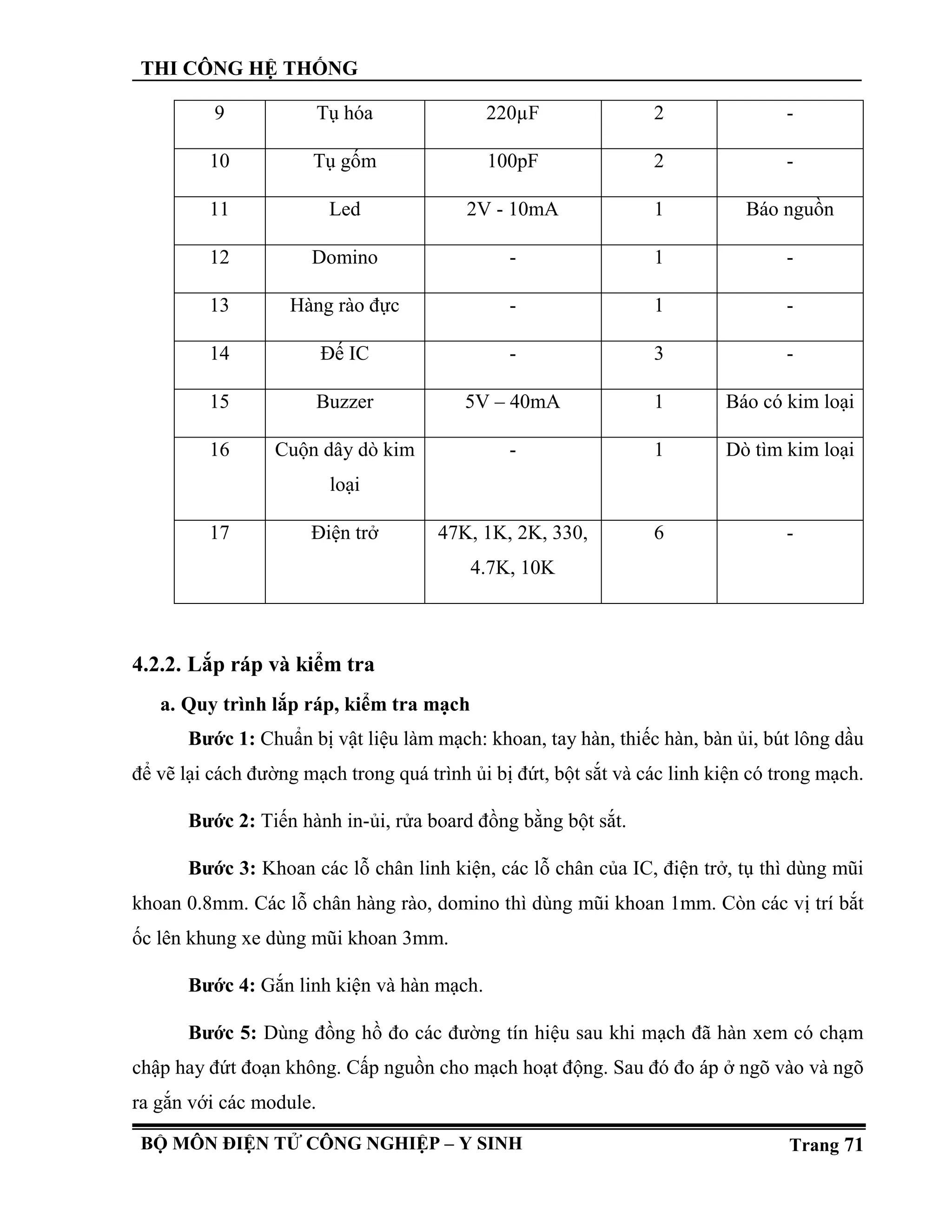
bản đại học quốc gia TP. Hồ Chí Minh.
[4] Trần Thu Hà, “Điện tử cơ bản”, NXB Đại học quốc gia Tp.HCM, 2013.
[5] Nguyễn Đình Phú – Nguyễn Trường Duy, “Giáo trình kĩ thuật số”, NXB Đại học quốc
gia Tp.HCM, 2013.
[6] Nguyễn Văn Lập và Hà Đăng Lộc, “Thiết kế xe điều khiển từ xa có live stream camera”,
Đồ án tốt nghiệp, trường ĐHSPKT Tp.HCM, 2018.
[7] Nguyễn Quốc Thái và Nguyễn Phước Tài, “Thiết kế robot hỗ trợ trẻ em học tập”, Đồ
án tốt nghiệp, trường ĐHSPKT Tp.HCM, 2018.
[8] Nguyễn Tiến Hòa và Ngô Minh Hiệp, “Thiết kế và thi công mô hình xe thăm dò môi
trường”, Đồ án tốt nghiệp, trường ĐHSPKT Tp.HCM, 2019.
Trang Web tham khảo
[9] “Arduino”, https://vi.wikipedia.org/wiki/Arduino.
[10] “Arduino là gì và những ứng dụng của nó trong cuộc sống”,
https://quantrimang.com/arduino-la-gi-va-ung-dung-cua-no-trong-cuoc-song-145388.
[11] “Động cơ giảm tốc là gì? Motor giảm tốc có gì khác so với hộp giảm tốc? Khái niệm
hộp giảm tốc?”, http://www.namtrung.com.vn/document/dong-co-giam-toc-la-gi-hop-
giam-toc-la-gi.
[12] “How Metal Detectors Work”, https://electronics.howstuffworks.com/gadgets/other-
gadgets/metal-detector2.htm.](https://image.slidesharecdn.com/thietkevathicongmohinhxerobotdotimkimloaidieukhienbangdienthoai2535-191217021520/75/Mo-hinh-xe-robot-do-tim-kim-lo-i-di-u-khi-n-b-ng-di-n-tho-i-HOT-125-2048.jpg)
![TÀI LIỆU THAM KHẢO
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH Trang 111
[13] “5 ứng dụng phổ biến nhất của máy dò kim loại”, http://maydopro.com/tin-tuc/chi-
tiet/5-ung-dung-pho-bien-nhat-cua-may-do-kim-loai.
[14] “WiFi Access Point”, https://arduino.esp8266.vn/wifi/access-point.html#softap.
[15] “Internet Of Things (IoT) : cho người mới bắt đầu”, https://iotmakervn.github.io/iot-
starter-book/#_esp8266.
[16] “Design of a Beat Frequency Oscillator Metal Detector”,
https://www.researchgate.net/publication/317106127_Design_of_a_Beat_Frequency_Osc
illator_Metal_Detector.](https://image.slidesharecdn.com/thietkevathicongmohinhxerobotdotimkimloaidieukhienbangdienthoai2535-191217021520/75/Mo-hinh-xe-robot-do-tim-kim-lo-i-di-u-khi-n-b-ng-di-n-tho-i-HOT-126-2048.jpg)













Đề tài tốt nghiệp của Nguyễn Hữu Phước và Võ Thành Phong là thiết kế và thi công mô hình xe robot dò tìm kim loại điều khiển bằng điện thoại, bao gồm các chức năng điều khiển từ xa và cảnh báo kim loại. Quá trình thực hiện bao gồm tìm hiểu lý thuyết, lập trình và thi công mạch, cũng như phát triển ứng dụng di động để điều khiển xe. Dự án được hoàn thành và báo cáo vào ngày 04/07/2019.























































































