

























Model Reference Adaptive Control.ppt
- 1. INTRODUCTION TO ADAPTIVE CONTROL BY Mohammed Nawfal Sheet Hussien Hani Nayef Muhammad Yasir Adel Supervised by Abdullah I. Abdullah Ali K. Mahmoud 1
- 2. Contents Adaptive Control Why Adaptive Control ? MRAC MIT Rule Design Example Lyapunove Rule Design example 2
- 3. 3 Adaptive Control Adaptive control is the control method used by a controller which must adapt to a controlled system with parameters which vary, or are initially uncertain. For example, as an aircraft flies, its mass will slowly decrease as a result of fuel consumption. Classification of adaptive control techniques 1.Direct Method: 2.Indirect Method: 3.Hybrid method Estimate the controller parameters Estimate the system parameters هي طريقة التحكم المستخدمة من قبل المسيطرة والتي يجب أن تتكيف لنظام متغ ير المعامالت أو غير مؤكدة في البداية . على سبيل المثال ، عندما تطير طائرة ستنخفض كتلتها ببطء نتيجة الستهالك الوقود . التكيفي التحكم
- 4. 4 2.System dynamics experience unpredictable parameter variations as the control operation goes on 1.Systems to be controlled have parameter uncertainty Why Adaptive Control ? Examples 1.Robot manipulation 2.Ship steering 3.Aircraft control 1 . متغيرة معامالت لديها عليها السيطرة يجب التي النظم 2 . يمك ال التي المعامالت لتغيرات تتغير النظام استجابة التنبؤ ن التحكم عملية الستمرار بها التكيفي التحكم لماذا
- 5. 5 Fig.1 Block diagram of MRAC Goal :Is to design a controller so that our process track the reference model An adaptive controller is a controller with adjustable parameters and a mechanism of adjusting the parameters MRAC لض وآلية للتعديل قابلة معامالت ذات تحكم وحدة هي التكيفية التحكم وحدة بط المعامالت التكيفي التحكم نموذج مرجع
- 6. 6 Adjustment of system parameters in a MRAC can be obtained in two ways. GRADIENT METHOD (MIT RULE) LYPNOV STABILITY THEORY MRAC IS COMPOSED OF Plant containing unknown parameters Reference model Adjustable parameters containing control law Ordinary feed back loop
- 7. m y y e Tracking error: Introduce the cost function J: 2 2 1 e J Where θ is a vector of controller parameters. Change the parameters in the direction of the negative gradient of e2. 7 Fig.2 : 1.MIT RULE
- 8. e e J dt d e is called the sensitivity derivative. It indicates how the error is influenced by the adjustable parameters θ. Example 1: Process: bu y a dt dy Model: c m m m m u b y a dt dy Controller: y u u c 2 1 Closed loop system: c c u b y b a y u b ay bu y a dt dy 1 2 2 1 Define the MIT Rule 8
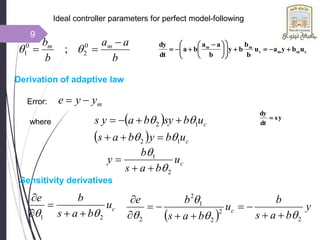
- 9. Ideal controller parameters for perfect model-following b a a b b m m 0 2 0 1 ; Derivation of adaptive law Error: m y y e where c u b a s b y 2 1 c c u b y b a s u b sy b a y s 1 2 1 2 Sensitivity derivatives c u b a s b e 2 1 y b a s b u b a s b e c 2 2 2 1 2 2 c m m c m m u b y a u b b b y b a a b a dt dy y s dt dy 9
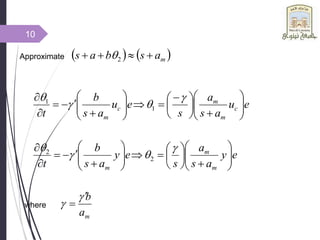
- 10. Approximate m a s b a s 2 where e u a s a s e u a s b t c m m c m 1 1 e y a s a s e y a s b t m m m 2 2 m a b 10
- 11. 11 Fig.3
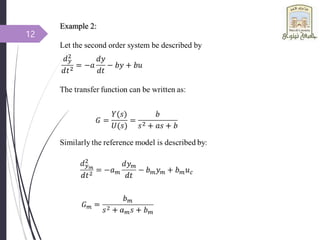
- 12. 12 Example 2: Let the second order system be described by
- 13. 13
- 14. 14 Applying the MIT rule, the update rules for each Theta was written. The block diagram for the system with the derived controller is shown on Figure 4. Fig. 4: MRAC system with MIT-Rule uc
- 15. 15 The MIT rule is applied to the second order system. The simulation model is shown in Figure 5. Fig. 5: Simulink diagram of Model Reference Adaptive Controller with MIT rule.
- 16. 16 The time response characteristics for the plant and the reference model are shown in Figure 6. Figure 6. Time response with θ1 and θ2 for MIT rule.
- 17. 17
- 18. 18 Fig. 8. Output error (y-ym) for MIT
- 19. 19 2.LYPNOV STABILITY THEORY The Lyapunov stability method is an important class of adaptive control. This method attempts to find the Lyapunov function and an adaptation mechanism in such a way that the error between plant and model goes to zero Fig. 9 Block diagram model reference adaptive control for lyapunov rule
- 20. 20 Considering, 2nd order Reference Model And a 2nd order Plant Model: By subtracting the equation (1) from equation (2), we get,
- 21. 21 Replacing in equation (5) from equation (3), we get, u Integrating equation (9) with respect to t, we get,
- 22. 22 Let the Lyapunov function for the error dynamics, This function is zero when e is zero and the controller parameters are equal to the correct values. For a valid Lyapunov function, time derivative of lyapunov function must be negative. The derivative is given by e
- 23. 23
- 24. 24 Fig.10 Structure Diagram of MRAC for Lyapunov Rule. r
- 25. 25 The lyapunove rule is applied to the second order system. The simulation model is shown in Figure 11. Fig. 11: Simulink diagram of Model Reference Adaptive Controller with lyapunove rule.
- 26. 26 The time response characteristics for the plant and the reference model are shown in Figure 12. Figure 12. Time response with θ1 and θ2 for Lyapunov rule.
- 27. 27
- 28. 28 Fig. 14 Output error (y-ym) for Lyapunov rule
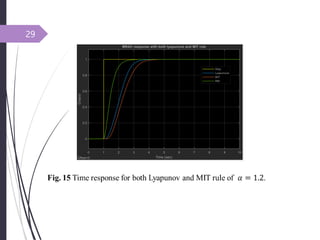
- 29. 29
- 30. 30 Fig. 16 Output error (y-ym) for MIT and Lyapunov rule
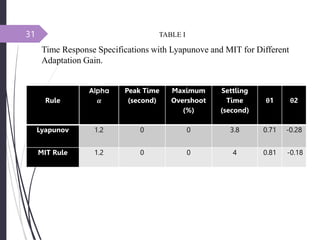
- 31. 31 Rule Peak Time (second) Maximum Overshoot (%) Settling Time (second) θ1 θ2 Lyapunov 1.2 0 0 3.8 0.71 -0.28 MIT Rule 1.2 0 0 4 0.81 -0.18 TABLE I Time Response Specifications with Lyapunove and MIT for Different Adaptation Gain.