Optimal Control System Design
2 likes•1,431 views

Control theory is applied to aerospace problems such as orbit transfer. The orbit transfer problem involves steering a spacecraft from an initial orbit to a final orbit using low thrust. This is modeled as an optimal control problem where the objective is to minimize fuel consumption. The Pontryagin Maximum Principle is used to characterize optimal trajectories. Shooting methods are employed to numerically solve the problem by determining the costates to satisfy the terminal constraints. Ongoing work applies continuation methods and handles more complex constraints.






























Optimal Control System Design
- 1. Introduction Shooting method Orbit transfer Three-body problem Optimal control and applications to aerospace problems E. Trélat Université Pierre et Marie Curie (Paris 6), Laboratoire J.-L. Lions and Institut Universitaire de France 6th European Congress of Mathematics, July 2012 E. Trélat Optimal control and applications to aerospace problems
- 2. Introduction Shooting method Orbit transfer Three-body problem What is control theory? Objective Steer a system from an initial configuration to a final configuration. Optimal control One tries moreover to minimize a given criterion. Stabilization A trajectory being planned, one tries to stabilize it in order to make it robust, insensitive to perturbations. Observability Reconstruct the full state of the system from partial data. E. Trélat Optimal control and applications to aerospace problems
- 3. Introduction Shooting method Orbit transfer Control theory and applica0ons Three-body problem Application fields are numerous: Applica0on domains of control theory: Mechanics Biology, medicine Vehicles (guidance, dampers, ABS, ESP, …), Aeronau<cs, aerospace (shu=le, satellites), robo<cs Predator-‐prey systems, bioreactors, epidemiology, medicine (peacemakers, laser surgery) Electricity, electronics RLC circuits, thermostats, regula<on, refrigera<on, computers, internet and telecommunica<ons in general, photography and digital video Economics Gain op<miza<on, control of financial flux, Market prevision Chemistry Chemical kine<cs, engineering process, petroleum, dis<lla<on, petrochemical industry E. Trélat Optimal control and applications to aerospace problems
- 4. Introduction Shooting method Orbit transfer Three-body problem Here we focus on applications of control theory to problems of aerospace. q3 2 0 −2 30 40 20 10 20 0 0 −10 −20 −20 −30 −40 q2 −40 5 q1 0 q3 q2 20 0 −20 −40 −60 −40 −20 0 20 q1 E. Trélat 40 −5 −50 0 q2 50 Optimal control and applications to aerospace problems
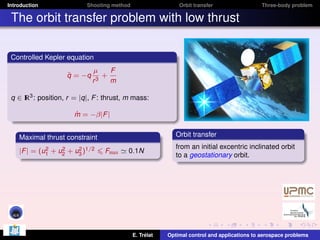
- 5. Introduction Shooting method Orbit transfer Three-body problem The orbit transfer problem with low thrust Controlled Kepler equation ¨ q = −q µ F + r3 m q ∈ I 3 : position, r = |q|, F : thrust, m mass: R ˙ m = −β|F | Orbit transfer Maximal thrust constraint 2 2 2 |F | = (u1 + u2 + u3 )1/2 Fmax 0.1N E. Trélat from an initial excentric inclinated orbit to a geostationary orbit. Optimal control and applications to aerospace problems
- 6. Introduction Shooting method Orbit transfer Three-body problem The orbit transfer problem with low thrust Controlled Kepler equation ¨ q = −q µ F + r3 m q ∈ I 3 : position, r = |q|, F : thrust, m mass: R ˙ m = −β|F | Orbit transfer Maximal thrust constraint 2 2 2 |F | = (u1 + u2 + u3 )1/2 Fmax 0.1N from an initial excentric inclinated orbit to a geostationary orbit. Controllability properties studied in B. Bonnard, J.-B. Caillau, E. Trélat, Geometric optimal control of elliptic Keplerian orbits, Discrete Contin. Dyn. Syst. Ser. B 5, 4 (2005), 929–956. B. Bonnard, L. Faubourg, E. Trélat, Mécanique céleste et contrôle de systèmes spatiaux, Math. & Appl. 51, Springer Verlag (2006), XIV, 276 pages. E. Trélat Optimal control and applications to aerospace problems
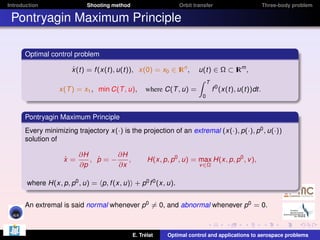
- 7. Introduction Shooting method Orbit transfer Three-body problem Modelization in terms of an optimal control problem „ State: x(t) = « q(t) ˙ q(t) Control: u(t) = F (t) Optimal control problem ˙ x(t) = f (x(t), u(t)), x(0) = x0 , x(t) ∈ I n , R x(T ) = x1 , Z min C(T , u), u(t) ∈ Ω ⊂ I m , R where C(T , u) = T f 0 (x(t), u(t))dt 0 E. Trélat Optimal control and applications to aerospace problems
- 8. Introduction Shooting method Orbit transfer Three-body problem Pontryagin Maximum Principle Optimal control problem ˙ x(t) = f (x(t), u(t)), x(0) = x0 ∈ I n , R x(T ) = x1 , min C(T , u), u(t) ∈ Ω ⊂ I m , R Z T where C(T , u) = f 0 (x(t), u(t))dt. 0 Pontryagin Maximum Principle Every minimizing trajectory x(·) is the projection of an extremal (x(·), p(·), p0 , u(·)) solution of ˙ x= ∂H ∂H ˙ , p=− , ∂p ∂x H(x, p, p0 , u) = max H(x, p, p0 , v ), v ∈Ω where H(x, p, p0 , u) = p, f (x, u) + p0 f 0 (x, u). An extremal is said normal whenever p0 = 0, and abnormal whenever p0 = 0. E. Trélat Optimal control and applications to aerospace problems
- 9. Introduction Shooting method Orbit transfer Three-body problem Pontryagin Maximum Principle H(x, p, p0 , u) = p, f (x, u) + p0 f 0 (x, u). Pontryagin Maximum Principle Every minimizing trajectory x(·) is the projection of an extremal (x(·), p(·), p0 , u(·)) solution of ˙ x= ∂H ∂H ˙ , p=− , ∂p ∂x H(x, p, p0 , u) = max H(x, p, p0 , v ). v ∈Ω u(t) = u(x(t), p(t)) “ locally, e.g. under the strict Legendre assumption: E. Trélat ” ∂2H (x, p, u) negative definite 2 ∂u Optimal control and applications to aerospace problems
- 10. Introduction Shooting method Orbit transfer Three-body problem Pontryagin Maximum Principle H(x, p, p0 , u) = p, f (x, u) + p0 f 0 (x, u). Pontryagin Maximum Principle Every minimizing trajectory x(·) is the projection of an extremal (x(·), p(·), p0 , u(·)) solution of ˙ x= ∂H ∂H ˙ , p=− , ∂p ∂x H(x, p, p0 , u) = max H(x, p, p0 , v ). v ∈Ω u(t) = u(x(t), p(t)) “ locally, e.g. under the strict Legendre assumption: E. Trélat ” ∂2H (x, p, u) negative definite 2 ∂u Optimal control and applications to aerospace problems
- 11. Introduction Shooting method Orbit transfer Three-body problem Shooting method: Extremals (x, p) are solutions of ∂H (x, p), x(0) = x0 , ∂p ∂H ˙ p=− (x, p), p(0) = p0 , ∂x ˙ x= (x(T ) = x1 ), Exponential mapping expx0 (t, p0 ) = x(t, x0 , p0 ), (extremal flow) where the optimal control maximizes the Hamiltonian. −→ Shooting method: determine p0 s.t. expx0 (t, p0 ) = x1 . Remark - PMP = first-order necessary condition for optimality. - Necessary / sufficient (local) second-order conditions: conjugate points. → test if expx0 (t, ·) is an immersion at p0 . E. Trélat Optimal control and applications to aerospace problems
- 12. Introduction Shooting method Orbit transfer Three-body problem There exist other numerical approaches to solve optimal control problems: direct methods: discretize the whole problem ⇒ finite-dimensional nonlinear optimization problem with constraints. Hamilton-Jacobi methods. The shooting method is called an indirect method. In the present aerospace applications, the use of shooting methods is priviledged in general because of their very good numerical accuracy. BUT: difficult to make converge... (Newton method) To improve their performances and widen their domain of applicability, optimal control tools must be combined with other techniques: geometric tools ⇒ geometric optimal control continuation or homotopy methods dynamical systems theory E. Trélat Optimal control and applications to aerospace problems
- 13. Introduction Shooting method Orbit transfer Three-body problem Orbit transfer, minimal time Maximum Principle ⇒ the extremals (x, p) are solutions of ˙ x= ∂H , x(0) = x0 , x(T ) = x1 , ∂p ˙ p=− ∂H , p(0) = p0 , ∂x with an optimal control saturating the constraint: u(t) = Fmax . −→ Shooting method: determine p0 s.t. x(T ) = x1 , combined with a homotopy on Fmax → p0 (Fmax ) Heuristic on tf : tf (Fmax ) · Fmax cste. (the optimal trajectories are "straight lines", Bonnard-Caillau 2009) (Caillau, Gergaud, Haberkorn, Martinon, Noailles, ...) E. Trélat Optimal control and applications to aerospace problems
- 14. Introduction Shooting method Orbit transfer Three-body problem Orbit transfer, minimal time P0 = 11625 km, |e0 | = 0.75, i0 = 7o , Pf = 42165 km Fmax = 6 Newton !4 1 x 10 30 arcsh det(! x) q3 2 0 −2 40 20 10 20 0 0 −10 −20 !1 −20 −30 0 100 200 300 400 500 300 400 500 t !3 −40 −40 q2 0 5 6 q1 x 10 5 "n!1 4 3 20 3 q q2 2 0 1 0 0 0 100 200 t −20 −40 −60 −40 −20 0 20 40 q1 Minimal time: 141.6 hours ( −5 −50 0 q 50 2 6 days). First conjugate time: 522.07 hours. E. Trélat Optimal control and applications to aerospace problems
- 15. Introduction Shooting method Orbit transfer Three-body problem Main tool used: continuation (homotopy) method → continuity of the optimal solution with respect to a parameter λ Theoretical framework (sensitivity analysis): expx0 ,λ (T , p0 (λ)) = x1 Local feasibility is ensured: Global feasibility is ensured: in the absence of conjugate points. in the absence of abnormal minimizers. ↓ ↓ this holds true for generic systems having more than 3 controls (Chitour-Jean-T, J. Differential Geom., 2006) Numerical test of Jacobi fields. E. Trélat Optimal control and applications to aerospace problems
- 16. Introduction Shooting method Orbit transfer Three-body problem Ongoing work with EADS Astrium: Minimal consumption transfer for launchers Ariane V and next Ariane VI (third atmospheric phase, strong thrust) Objective: automatic and instantaneous software. continuation on the curvature of the Earth (flat Earth –> round Earth) M. Cerf, T. Haberkorn, E. Trélat, Continuation from a flat to a round Earth model in the coplanar orbit transfer problem, Optimal Appl. Cont. Methods (2012). eclipse constraints → state constraints, hybrid systems T. Haberkorn, E. Trélat, Convergence results for smooth regularizations of hybrid nonlinear optimal control problems, SIAM J. Control Optim. (2011). E. Trélat Optimal control and applications to aerospace problems
- 17. Introduction Shooting method Orbit transfer Three-body problem Optimal control A challenge (urgent!!) Collecting space debris: 22000 debris of more than 10 cm (cataloged) 500000 debris between 1 and 10 cm (not cataloged) millions of smaller debris In low orbit → difficult mathematical problems combining optimal control, continuous / discrete / combinatorial optimization (PhD of Max Cerf, to be defended in 2012) Ongoing studies, CNES, EADS, NASA E. Trélat Optimal control and applications to aerospace problems
- 18. Introduction Shooting method Orbit transfer Three-body problem Optimal control A challenge (urgent!!) Collecting space debris: 22000 debris of more than 10 cm (cataloged) 500000 debris between 1 and 10 cm (not cataloged) millions of smaller debris Around the geostationary orbit → difficult mathematical problems combining optimal control, continuous / discrete / combinatorial optimization (PhD of Max Cerf, to be defended in 2012) Ongoing studies, CNES, EADS, NASA E. Trélat Optimal control and applications to aerospace problems
- 19. Introduction Shooting method Orbit transfer Three-body problem Optimal control A challenge (urgent!!) Collecting space debris: 22000 debris of more than 10 cm (cataloged) 500000 debris between 1 and 10 cm (not cataloged) millions of smaller debris The space garbage collectors → difficult mathematical problems combining optimal control, continuous / discrete / combinatorial optimization (PhD of Max Cerf, to be defended in 2012) Ongoing studies, CNES, EADS, NASA E. Trélat Optimal control and applications to aerospace problems
- 20. Introduction Shooting method Orbit transfer Three-body problem The circular restricted three-body problem Dynamics of a body with negligible mass in the gravitational field of two masses m1 and m2 (primaries) having circular orbits: Equations of motion in the rotating frame ∂Φ ∂x ∂Φ ¨ ˙ y + 2x = ∂y ∂Φ ¨ z= ∂z ¨ ˙ x − 2y = with Φ(x, y , z) = x2 + y2 1 − µ µ µ(1 − µ) + , + + 2 r1 r2 2 and q (x + µ)2 + y 2 + z 2 , q Main references (x − 1 + µ)2 + y 2 + z 2 . r1 = r2 = E. Trélat American team: Koon, Lo, Marsden, Ross... Spanish team: Gomez, Jorba, Llibre, Masdemont, Simo... Optimal control and applications to aerospace problems
- 21. Introduction Shooting method Orbit transfer Three-body problem Lagrange points ˙ ˙ ˙ Jacobi integral J = 2Φ − (x 2 + y 2 + z 2 ) → 5-dimensional energy manifold Five equilibrium points: 3 collinear equilibrium points: L1 , L2 , L3 (unstable); 2 equilateral equilibrium points: L4 , L5 (stable). (see Szebehely 1967) Extension of a Lyapunov theorem (Moser) ⇒ same behavior than the linearized system around Lagrange points. E. Trélat Optimal control and applications to aerospace problems
- 22. Introduction Shooting method Orbit transfer Three-body problem Lagrange points in the Earth-Sun system From Moser’s theorem: L1 , L2 , L3 : unstable. L4 , L5 : stable. E. Trélat Optimal control and applications to aerospace problems
- 23. Introduction Shooting method Orbit transfer Three-body problem Lagrange points in the Earth-Moon system L1 , L2 , L3 : unstable. L4 , L5 : stable. E. Trélat Optimal control and applications to aerospace problems
- 24. Introduction Shooting method Orbit transfer Three-body problem Examples of objects near Lagrange points Points L4 and L5 (stable) in the Sun-Jupiter system: trojan asteroids E. Trélat Optimal control and applications to aerospace problems
- 25. Introduction Shooting method Orbit transfer Three-body problem Examples of objects near Lagrange points Sun-Earth system: Point L1: SOHO Point L3: planet X... Point L2: JWST E. Trélat Optimal control and applications to aerospace problems
- 26. Introduction Shooting method Orbit transfer Three-body problem Periodic orbits From a Lyapunov-Poincaré theorem, there exist: a 2-parameter family of periodic orbits around L1 , L2 , L3 a 3-parameter family of periodic orbits around L4 , L5 Among them: planar orbits called Lyapunov orbits; 3D orbits diffeomorphic to circles called halo orbits; other 3D orbits with more complicated shape called Lissajous orbits. (see Richardson 1980, Gomez Masdemont Simo 1998) E. Trélat Optimal control and applications to aerospace problems
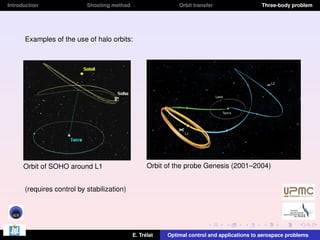
- 27. Introduction Shooting method Orbit transfer Three-body problem Examples of the use of halo orbits: Orbit of SOHO around L1 Orbit of the probe Genesis (2001–2004) (requires control by stabilization) E. Trélat Optimal control and applications to aerospace problems
- 28. Introduction Shooting method Orbit transfer Three-body problem Invariant manifolds Invariant manifolds (stable and unstable) of periodic orbits: 4-dimensional tubes (S 3 × I inside the 5-dimensional energy manifold. R) (they play the role of separatrices) –> invariant "tubes", kinds of "gravity currents" ⇒ low-cost trajectories E. Trélat Optimal control and applications to aerospace problems
- 29. Introduction Shooting method Orbit transfer Three-body problem Invariant manifolds Invariant manifolds (stable and unstable) of periodic orbits: 4-dimensional tubes (S 3 × I inside the 5-dimensional energy manifold. R) (they play the role of separatrices) –> invariant "tubes", kinds of "gravity currents" ⇒ low-cost trajectories Cartography ⇒ design of low-cost interplanetary missions E. Trélat Optimal control and applications to aerospace problems
- 30. Introduction Shooting method Orbit transfer Three-body problem Meanwhile... Back to the Moon ⇒ lunar station: intermediate point for interplanetary missions Challenge: design low-cost trajectories to the Moon and flying over all the surface of the Moon. Mathematics used: dynamical systems theory, differential geometry, ergodic theory, control, scientific computing, optimization E. Trélat Optimal control and applications to aerospace problems
- 31. Introduction Shooting method Orbit transfer Three-body problem Eight Lissajous orbits (PhD thesis of G. Archambeau) Periodic orbits around L1 et L2 (Earth-Moon system) having the shape of an eight: ⇒ Eight-shaped invariant manifolds: E. Trélat Optimal control and applications to aerospace problems
- 32. Introduction Shooting method Orbit transfer Three-body problem Invariant manifolds of Eight Lissajous orbits We observe numerically that they enjoy two nice properties: 1) Stability in long time of invariant manifolds Invariant manifolds of an Eight Lissajous orbit: Invariant manifolds of a halo orbit: → chaotic structure in long time → global structure conserved (numerical validation by computation of local Lyapunov exponents) E. Trélat Optimal control and applications to aerospace problems
- 33. Introduction Shooting method Orbit transfer Three-body problem Invariant manifolds of Eight Lissajous orbits We observe numerically that they enjoy two nice properties: 2) Flying over almost all the surface of the Moon Invariant manifolds of an eight-shaped orbit around the Moon: oscillations around the Moon global stability in long time minimal distance to the Moon: 1500 km. G. Archambeau, P. Augros, E.T., Eight Lissajous orbits in the Earth-Moon system, MathS in Action (2011). E. Trélat Optimal control and applications to aerospace problems
- 34. Introduction Shooting method Orbit transfer Three-body problem Perspectives Partnership between EADS Astrium Space Transportation (les Mureaux, France) and FSMP (Fondation Sciences Mathématiques de Paris): → starting next october 2012 → scientific collaboration with PhD’s, postdocs Planning low-cost missions to the Moon or interplanetary one, using the gravity corridors and other gravitational properties mixed optimization: interplanetary missions: compromise between low cost and long transfer time; gravitational effects (swing-by) optimal conception of space vehicles collecting space debris optimal placement problems (vehicle design, sensors) Inverse problems: reconstructing a thermic, acoustic, electromagnetic environment (coupling ODE’s / PDE’s) Robustness problems ... E. Trélat Optimal control and applications to aerospace problems
- 35. Introduction Shooting method Orbit transfer Three-body problem Invariant manifolds of eight-shaped Lissajous orbits Φ(·, t): transition matrix along a reference trajectory x(·) ∆ > 0. Local Lyapunov exponent λ(t, ∆) = „ « q 1 ln maximal eigenvalue of Φ(t + ∆, t)ΦT (t + ∆, t) ∆ Simulations with ∆ = 1 day. E. Trélat Optimal control and applications to aerospace problems
- 36. Introduction Shooting method Orbit transfer LLE of an eight-shaped Lissajous orbit: Three-body problem LLE of an halo orbit: LLE of an invariant manifold of an eight-shaped Lissajous orbit: E. Trélat LLE of an invariant manifold of an halo orbit: Optimal control and applications to aerospace problems