Self Driving Car Using Raspberry Pi and OpenCV.pptx
Download as PPTX, PDF•0 likes•223 views

This document outlines a project for developing a Raspberry Pi-based self-driving car that utilizes OpenCV for lane detection and autonomous navigation, aimed at enhancing understanding of robotics and AI. The project addresses challenges of manual driving and traffic efficiency while focusing on affordable and educational prototypes. Key features include real-time processing, dynamic motor control, and a modular development approach, with future enhancements planned for obstacle detection and improved algorithms.






















Self Driving Car Using Raspberry Pi and OpenCV.pptx
- 1. Raspberry Pi-Based Self-Driving Car with Lane Detection using OpenCV Project Presentation Submitted in partial fulfilment of the requirements for the award of the Degree of MCA by Devashish Negi 221381012 Under the guidance of Ms. Vaishnavi T DEPARTMENT OF COMPUTER APPLICATIONS DEPARTMENT OF COMPUTER APPLICATIONS GRAPHIC ERA UNIVERSITY, DEHRADUN (INDIA) AUGUST 2024
- 2. Problem Definition – Why this Project? • Exploration of Autonomous Vehicles: Autonomous vehicles are the future of transportation. By developing this self-driving car project, I aimed to gain hands-on experience in the technology that powers such systems, including lane detection and autonomous navigation. This project also serves as an educational tool to enhance my understanding of electronics, computer vision, and AI. • Skill Development: The project is an opportunity to strengthen skills in robotics, Python programming, hardware integration, and machine learning, areas essential for my career aspirations in AI and autonomous systems. • Real-World Application: Creating a scaled-down version of a self-driving car allows me to simulate real-world driving scenarios, making it easier to explore the challenges faced by autonomous vehicles.
- 3. Problems/Disadvantages of the Existing System • Manual Driving Limitations: Manual driving requires constant human attention, leading to driver fatigue, human error, and accidents. Autonomous vehicles aim to minimize these risks by taking over driving tasks. • Traffic Congestion and Efficiency: Human drivers are often less efficient in heavy traffic situations, leading to congestion and delays. Autonomous systems can optimize driving behaviours, improve traffic flow, and reduce fuel consumption. • Lack of Affordable Solutions: Current commercial self- driving technologies are expensive and complex. Developing affordable, smaller-scale models like this project can help in learning and prototyping solutions for budget-constrained environments or educational purposes.
- 4. Project Requirements (Functional & Performance) • Functional Requirements: • Lane Detection – should be able to accurately detect lanes • Autonomous Navigation – should be able to navigate autonomously • Motor Control – should be able to precisely control motors • User Interface – if possible, should provide an interface for debugging • Power Management – it’s always a desired trait • Performance Requirements: • Real-Time Processing – should be able to operate in real time • Accuracy – Lane Detection and turns should be accurate • Stability and Reliability – should maintain stable and reliable performance • Scalability – design and code should be scalable
- 5. Introduction - Project Overview Project Type: Autonomous vehicle prototype using Raspberry Pi and OpenCV. Domain: Robotics, Computer Vision, and AI. Purpose: Develop a small-scale self-driving car capable of lane detection and autonomous navigation.
- 6. Introduction – Project Objectives Implement real- time lane detection using a Raspberry Pi camera and OpenCV. Achieve autonomous navigation by dynamically controlling motor speed and direction. Enhance understanding of robotics, electronics, and AI through hands-on experience. Create a scalable and educational platform for testing autonomous vehicle concepts. Test and refine the system’s performance in various real-world conditions.
- 7. Scope of the Project - Advantages • Hands-On Learning: Provides a practical platform for learning robotics, AI, and computer vision. • Scalability: Designed to allow future enhancements, such as obstacle detection and advanced navigation features. • Affordability: Utilizes cost-effective components like Raspberry Pi and basic sensors, making it accessible for educational and hobbyist purposes. • Real-Time Processing: Achieves lane detection and navigation in real-time, ensuring smooth operation without delays.
- 8. Scope of the Project - Features •Autonomous Lane Detection: Uses OpenCV to detect and follow lanes, enabling the car to navigate independently. •Dynamic Motor Control: Adjusts motor speed and direction based on real-time lane data, ensuring accurate path-following. •Portable Design: Compact and lightweight, making it easy to test in various environments. •Modular Code Structure: The code is organized into modules (e.g., Motor Control, Lane Detection) for easy understanding and modification. •Battery-Powered Operation: Runs on a battery pack, providing mobility and flexibility in testing. This Photo by Unknown Author is licensed under CC BY-ND
- 9. Scope of the Project - Features •Educational Focus: Specifically designed as a learning tool for students and hobbyists, bridging the gap between theory and practice. •Customizable Warping and Thresholding: Allows for adjustments to image processing techniques to suit different testing conditions. •Resource Efficiency: Optimized for minimal CPU and memory usage, ensuring reliable performance on a Raspberry Pi. This Photo by Unknown Author is licensed under CC BY
- 10. Process Model •Modular Development: The incremental model allowed me to break down the project into smaller, manageable modules (e.g., Motor Control, Lane Detection, Camera Integration). •Continuous Testing and Refinement: to test each module as it was developed, identifying and fixing issues early on. This ensured that the final integrated system was robust and functional. •Scalability: model provided the flexibility to add new features or improve existing ones in future iterations, making it suitable for a project that may evolve over time. •Focus on Core Features First: By prioritizing essential functionalities (like lane detection and motor control) in the initial increments, I ensured that the core system was operational early in the development process, allowing for focused improvements later.
- 11. Minimum Software Requirements Programming Languages: • Python: Primary language for scripting • Bash: managing Raspberry Pi configurations and running scripts. Integrated Development Environment (IDE): • Thonny: A lightweight IDE for Python. • Visual Studio Code: An alternative IDE for code development Libraries and Frameworks: • OpenCV: For image processing and computer vision tasks. • RPi.GPIO: For controlling GPIO pins on the Raspberry Pi Platforms: • Raspberry Pi OS: The operating system running on the Raspberry • Tinkercad: Used for simulating and testing electronic circuits • Fritzing: for developing schematics and Breadboard Diagrams This Photo by Unknown Author is licensed under CC BY-SA
- 12. Minimum Hardware Requirements • Raspberry Pi – for main processing and computation • RPi Camera Module – for capturing live video • Motor Driver – to run motors • BO Motors – for driving car’s wheel • Battery Pack – to power RPi and Motor Driver • Car Chassis – a frame for the RC Car • Breadboard – for tinkering • Jumper Wires – for connecting to GPIO pin and Motor Drivers
- 13. Module 1 - Motor Control Module • Purpose • Control Motor Speed and Direction: This module manages the car's movement by adjusting the speed and direction of the motors based on the input curve value from the lane detection module. • Working • PWM Control: Uses Pulse Width Modulation (PWM) to control the speed of the motors. • Direction Logic: Determines the direction (forward, backward, left, right) by toggling the GPIO pins connected to the L293D motor driver. • Shared Parameters • Curve Value: Received from the Lane Detection Module, used to adjust the motors' speed and direction. • Goal • Smooth Navigation: Ensure the car follows the detected lane smoothly and accurately by dynamically adjusting motor behaviour.
- 14. Module 2 - Lane Detection Module Purpose • Detect Lane Curvature: processes the camera feed to identify the lane on the road and calculates the curvature Working • Image Processing: Applies thresholding, warping, and histogram analysis to extract lane lines • Curve Calculation: Computes the curve value, which indicates the necessary steering adjustment. Shared Parameters • Camera Feed: processed to detect lanes. • Curve Value: Output to the Motor Control Module to guide the car's movement. Goal • Accurate Lane Following: Ensure the car stays within the lane by providing real-time steering adjustments.
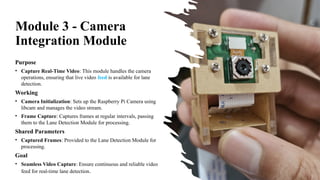
- 15. Module 3 - Camera Integration Module Purpose • Capture Real-Time Video: This module handles the camera operations, ensuring that live video feed is available for lane detection. Working • Camera Initialization: Sets up the Raspberry Pi Camera using libcam and manages the video stream. • Frame Capture: Captures frames at regular intervals, passing them to the Lane Detection Module for processing. Shared Parameters • Captured Frames: Provided to the Lane Detection Module for processing. Goal • Seamless Video Capture: Ensure continuous and reliable video feed for real-time lane detection.
- 16. Module 4 - Main Control Module Purpose • Orchestrate System Operations: This module acts as the central controller, coordinating the interactions between all other modules. Working • Initialization: Sets up all other modules, ensuring they are ready to operate. • Continuous Loop: Runs an infinite loop where it captures camera feed, processes lane detection, and adjusts motor control in real-time. Shared Parameters • Control Signals: Manages the communication between Lane Detection, Motor Control, and Camera Integration modules. Goal • System Stability and Coordination: Ensure all modules work together seamlessly to achieve the desired autonomous navigation.
- 18. Schematics
- 19. CAR IMAGES
- 20. Test Result - 1
- 21. Test Result - 2
- 22. Test Video 2
- 23. Limitations of the Project • Limited Processing Power: though raspberry pi 4 is powerful, still the processing power can be limited for advanced system • Basic Lane Detection: the lane detection algorithm is basic but can still be enhanced in future • Environmental Sensitive: the project heavily relies on consistent lightning condition, which can be challenging • Obstacle Detection: currently no obstacle detection mechanism is incorporated, but that can be easily implemented • Battery Life: this is also a concern but as the project is improved, this can easily be maintained
- 24. Bibliography/References • https://www.computervision.zone/ • https://www.synopsys.com/glossary/what-is-autonomous-car.htm l • https://www.mobileye.com/blog/history-autonomous-vehicles-re naissance-to-reality/ • https://www.motorcities.org/story-of-the-week/2022/the-gm-fire bird-ii-show-car-made-automotive-history • https://www.terra.com.br/noticias/educacao/historia/leonardo-da- vinci-a-inteligencia-da-fraternidade,54b2127ace2f5824c094c854 65b98888iwvudfnq.html • https://www.ri.cmu.edu/robotics-groups/navlab/ • https://www.cnbc.com/2023/10/26/uber-begins-offering-rides-in- self-driving-waymo-cars.html • https://www.darpa.mil/about-us/timeline/-grand-challenge-for-au tonomous-vehicles
- 25. THANK YOU o o