Sources of errors in GNSS measurements and dilution of precision (DOP) parameter (Lecture 6)
Download as PPTX, PDF0 likes1,462 views

The document discusses sources of errors in GNSS measurements, including timing inaccuracies from satellite and receiver clocks, orbit errors, ionospheric and tropospheric delays, and multipath effects. It explains how these errors contribute to User Equivalent Range Error (UERE) and the importance of satellite geometry, represented by the Dilution of Precision (DOP), in determining the accuracy of positioning. The document emphasizes that correcting these errors is crucial for improving GNSS measurement precision.











Sources of errors in GNSS measurements and dilution of precision (DOP) parameter (Lecture 6)
- 1. Lecture 6. Sources of errors in GNSS measurements and dilution of precision (DOP) parameter
- 2. The position calculated by a satellite navigation receiver relies on three measurements: - time - position of satellite - range between satellite and receiver precise time position of satellite range satellite-receiver All measurements should be performed in system time scale. The clock of the receiver is out-of- sync with the satellite’s clock (𝜏). On-board clock of each satellite also contains some drift (𝛿𝑡 𝑠). Satellite’s coordinates in space are applied in calculations of user’s location. These coordinates are result of ephemeris recalculation. There is ephemeris error (𝛿𝜏 𝑒𝑝ℎ). Receiver performs measurements of range to navigation satellite. All errors of this measurement affect on accuracy of positioning. 𝑅 𝑚𝑒𝑎𝑠𝑢𝑟𝑒𝑑 = 𝑅 𝑡𝑟𝑢𝑒 + 𝑐𝜏 + 𝑐𝛿𝑡 𝑠 + 𝑐𝛿𝑡 𝑒𝑝ℎ
- 3. Further errors occur during signal propagation and in the user segment: 𝛿𝑡𝑖𝑜𝑛 − ionospheric error 𝑐𝛿𝑡𝑡𝑟𝑜𝑝 − tropospheric error 𝑐𝛿𝑡 𝑚 − multipath error 𝑐𝛿𝑡 𝑜𝑡ℎ𝑒𝑟 − other errors These error terms also should be taken into account in the range equation. The pseudo-distance equation 𝑅 𝑚𝑒𝑎𝑠𝑢𝑟𝑒𝑑 = 𝑅 𝑡𝑟𝑢𝑒 + 𝑐𝜏 + 𝑐𝛿𝑡 𝑠 + 𝑐𝛿𝑡 𝑒𝑝ℎ + 𝑐𝛿𝑡𝑖𝑜𝑛 + 𝑐𝛿𝑡𝑡𝑟𝑜𝑝 + 𝑐𝛿𝑡 𝑚 + 𝑐𝛿𝑡 𝑜𝑡ℎ𝑒𝑟 UERE (user equivalent range error) – difference between true distance from a satellite to the receiver and its measured pseudo-distance
- 4. UERE (user equivalent range error) – quantity that is obtained when we combine receiver noise, satellite clock and ephemeris error, atmospheric error, multipath – all expressed in units of distance. UERE errors originate from different sources and thus are independent of each other. The total UERE is the square root of the sum of the squares of the individual errors. 𝜎𝑟𝑎𝑛𝑔𝑒 = 𝜎𝑖𝑜𝑛𝑜 2 + 𝜎𝑡𝑟𝑜𝑝𝑜 2 + 𝜎𝑒𝑝ℎ𝑒𝑚 2 + 𝜎𝑐𝑙𝑜𝑐𝑘_𝑒𝑟𝑟𝑜𝑟𝑠 2 + 𝜎 𝑚𝑢𝑙𝑡𝑖𝑝𝑎𝑡ℎ 2
- 5. Satellite Clocks The atomic clocks in the GNSS satellites are very accurate, but they do drift a small amount. Unfortunately, a small inaccuracy in the satellite clock results in a significant error in the position calculated by the receiver. 10−9 ∙ 3 ∙ 109 = 3 metres of position error. The clock on the satellite is monitored by the GNSS ground control system and compared to the even more accurate clock used in the ground control system. In the downlink data, the satellite provides the user with an estimate of its clock offset. Typically, the estimate has an accuracy of about ±2 meters, although the accuracy can vary between different GNSS systems. To obtain a more accurate position, the GNSS receiver needs to compensate for the clock error.
- 6. Orbit Errors GNSS satellites travel in very precise, well known orbits. However the orbits do vary a small amount. Also, like the satellite clocks, a small variation in the orbit results in a significant error in the position calculated. The GNSS ground control system continually monitors the satellite orbit. When the satellite orbit changes, the ground control system sends a correction to the satellites and the satellite ephemeris is updated. Even with the corrections from the GNSS ground control system, there are still small errors in the orbit that can result in up to ±2.5 meters of position error.
- 7. The ionosphere is the layer of atmosphere between 80 km and 800 km above the earth. This layer contains electrically charged particles called ions. These ions delay the satellite signals and can cause a significant amount of satellite position error (typically ±5 meters, but can be more during periods of high ionospheric activity). Ionospheric delay varies with solar activity, time of year, season, time of day and location. This makes it very difficult to predict how much ionospheric delay is impacting the calculated position. Ionospheric delay
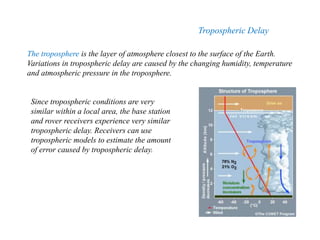
- 8. The troposphere is the layer of atmosphere closest to the surface of the Earth. Variations in tropospheric delay are caused by the changing humidity, temperature and atmospheric pressure in the troposphere. Tropospheric Delay Since tropospheric conditions are very similar within a local area, the base station and rover receivers experience very similar tropospheric delay. Receivers can use tropospheric models to estimate the amount of error caused by tropospheric delay.
- 9. MultipathMultipath occurs when a GNSS signal is reflected off an object, such as the wall of a building, to the GNSS antenna. Because the reflected signal travels farther to reach the antenna, the reflected signal arrives at the receiver slightly delayed. This delayed signal can cause the receiver to calculate an incorrect position. The simplest way to reduce multipath errors is to place the GNSS antenna in a location that is away from the reflective surface. When this is not possible, the GNSS receiver and antenna must deal with the multipath signals.
- 10. The influence of satellite geometry The precision of positioning with GNSS navigation depends on the one hand on the precision of individual pseudorange measurements and on the other hand on the geometric configuration of the satellites used. This configuration is expressed in terms of scalar value DOP (Dilution of Precision) B range measurement with error, green space - area of user possible location A the measurement error is the same, but the error on their position has grown considerably due to the arrangement of the landmarks. C the measurement error is the same, but the error on their position has grown considerably due to the arrangement of the landmarks.
- 11. Dilution of Precision In any ranging system, receiver-transmitter geometry influences position precision. In (a), the position uncertainty is small (low dilution of precision). In (b), transmitter 2 is moved closer to transmitter 1, and, although the measurement error is the same, the position uncertainty is considerably larger (high dilution of precision)