training report on embedded system and AVR
16 likes5,654 views

The document provides an in-depth overview of embedded systems, detailing their definition, characteristics, and the role of microcontrollers within these systems. It introduces Embedded C programming specifically for microcontrollers, along with basic electronic components like resistors and capacitors. Additionally, it covers the AVR microcontroller architecture and its various classifications, highlighting features and operational aspects essential for designing embedded devices.



































training report on embedded system and AVR
- 1. 1 CHAPTER 1 EMBEDDED SYSTEM 1.1 INTRODUCTION TO EMBEDDED SYSTEM Embedded System is a special purpose computer. It helps in infusing artificial intelligence into an electronic system. DEFINITION: Embedded System is a combination of Hardware and Software to meet specific needs in a given time frame. E.g.: Daily life embedded systems are cell phones, printers, ATM etc. Fig. 1.1 An Embedded System Suppose you have a bare processor , its bare so you can not dare to ask it save any result anywhere , thus you “added” a memory , let’s say “added” in a better term that “you embedded a memory ” that is your RAM.
- 2. 2 Now you want to forward this logic to real world , before adding some output pins you need a register to bridge between RAM and output pins , this register do a special function of forwarding logic 1 and 0 in a term of 5 and 0 volts , so that’s a special function. So there you SFR and output PIN. An embedded system is a system that has a software embedded into hardware, which makes a system dedicated for an application or specific part of an application or product or part of a larger system. It processes a fixed set of pre-programmed instructions to control electromechanical equipment which may be a part of even larger system (not a computer wid keyboard, display, etc.). A general purpose definition of embedded system is that they are devices used to control monitor or assist the operation of equipment, machinery or plant. “Embedded” reflects the fact that they are an integral part of the system. 1.2 CHARACTERISTICS OF EMBEDDED SYSTEM Modern embedded systems are based on microcontrollers. A microcontroller is a small, low-cost computer-on-a-chip which usually includes: 1. A microprocessor (CPU). 2. A small amount of RAM. 3. Programmable ROM and/or flash memory. 4. Parallel and/or serial I/O. 5. Timers and signal generators. 6. Analog to Digital (A/D) and/or Digital to Analog (D/A) conversion. 1.3 Why embedded system? Take it as granted, that everything which runs on electric and does not have motor, shall be a part of embedded. Robotics is a major part of embedded, which concern hoe to interface machinery with our software to perform a certain task Though , definition of an embedded system says ‘A circuit which has been programmed to perform a particular task’ , but it’s a human need to utilize a
- 3. 3 gadget (electronics) as much as it could do, here we come with general purpose system (a system which can perform many task).This part has software and efficient coding in main concern. Embedded has booming future, this is predecessor of robotics, Al and various human-machine interface.
- 4. 4 CHAPTER 2 EMBEDDED C 2.1 INTRODUCTION Embedded c is a subset of c language which is compatible with certain microcontrollers. Some features are added using header files like <avr/io.h>, <util/delay.h>. Scanf and printf are removed as the inputs are sanned from the sensors and outputs are given to the ports. Control structures remain the same like if-statement, for loop, do while etc. 2.2 STRUCTURE OF A C PROGRAM FOR AN EMBEDDED SYSTEM //Headers #include<avr/io.h>//header file for avr i/o #include<util/delay.h>//header file for delay //main program { Int main () While(1) { code…. } Return (0); }
- 5. 5 2.3 STATEMENTS USED IN EMBEDDED C 2.3.1 If – statement Syntax: If(condition) { Statement…… } Else { Statement…… } Program for if statement Int a=4; Int b=5; If(a>b) Printf(“a is largest”); Else Printf(“b is largest”); 2.3.2 Do while loop Syntax: Initial counter Do { statement….. update statement } While (condition);
- 6. 6 Program for do while Int A=4; Do { A++; } While(A>5); 2.3.3 For – statement Syntax: For(initial counter; test condition; update statement) { Statement…. Statement…. } Program for for-statement For(int i=0;i<5;i++) Printf(“hello sir’14”);
- 7. 7 CHAPTER 3 BASIC ELECTRONICS COMPONENTS 3.1 RESISTOR A resistor is a two-terminal passive electronic component. It is that limits or regulates the flow of electrical current, voltage and power dissipation in an electronic circuit. Resistors can also be used to provide a specific voltage for an active device such as transistor. Mainly resistor are classified according to their resistance values and there power ratings. Resistances range from 10ohm to 56mohm (or more) and power ratings from 1/8w to20 Units The ohm (symbol: Ω). Commonly used multiples and submultiples in electrical and electronic usage are the milliohm (1x10-3 ), kilohm (1x103 ), and megaohm (1x106 ). Color coding We can measure the resistance of a resistor. This is done by color coding over the resistor you can use multi-meter to measure resistance. As a beginner you should use color coding. Usually we can see that 4-band code, 5-band code and 6-band code registers are available but we mainly get resistors of 4- band code. Fig. 3.1 Resistor color coding
- 8. 8 3.3 Capacitor A capacitor is used to store charge. Like resistors there is fixed as well as variable capacitor also. But we mostly use fixed capacitor in robotics; variable capacitors are mainly used in analog communication. These are capacitors with no polarity. Ceramic and mica capacitors available are of no polarity, but electrolytic capacitors are of polarity. We can identify negative lead of electrolytic capacitor by checking the length of the lead, one with less length s –ve. On the body of electrolytic capacitor –ve symbol is shown. Be careful about electrolytic capacitor because inverting polarity can make ‘explosion’. Every electrolytic has two factors- value of its capacitance and other maximum voltagerating. There are mainly two types of capacitors. 1. Electrolytic capacitor- they are used for low frequency, high capacity applications and they are “polar” meaning that one leg must be connected to negative and the other must be connected to positive supply. One of their use is as low frequency filter in power supplies. 2. Ceramic capacitors- they are used in high frequency, low capacity applications. One of their use in computers is for filtering high frequency noise from the system. C = Q / V
- 9. 9 Fig. 3.2 Capacitors 3.4 POWER SUPPLY Fig. 3.3 Power supply circuit diagram Operating Voltages ● 2.7 - 5.5V (ATmega8L) ● 4.5 - 5.5V (ATmega8)
- 10. 10 Power Consumption at 4 Mhz, 3V, 25°C ● Active: 3.6 mA ● Idle Mode: 1.0 mA ● Power-down Mode: 0.5 μA 3.4.1 BRIDGE RECTIFIERS Bridge rectifier circuit consists of four diodes arranged in the form of a bridge as shown in figure. Operation: During the positive half cycle of the input supply, the upper end A of the transformer secondary becomes positive with respect to its lower point B. This makes Point1 of bridge positive with respect to point2. The diode D1 & D2 become forward biased & D3 & D4 become reverse biased. As a result a current starts flowing from point1, through D1 the load & D2 to the negative end. During negative half cycle, the point2 becomes positive with respect to point1. DiodeD1 & D2 now become reverse biased. Thus a current flow from point 2 to point 1.
- 11. 11 CHAPTER 4 MICROCONTROLLER 4.1 INTRODUCTION The situation we find ourselves today in the field of microcontrollers has its beginnings in the development of technology of integrated circuits. It enabled us to store hundreds of thousands of transistors into one chip, which was a precondition for the manufacture of microprocessors. The first computers were made by adding external peripherals, such as memory, input/output lines, timers and other circuits, to it. Further increasing of package density resulted in designing an integrated circuit which contained both processor and peripherals. This is how the first chip containing a microcomputer later known as the microcontroller was developed. 4.2 CHARACTERISTICS OF MICROCONTROLLERS • Microcontrollers are important part of Embedded systems • To understand Structure & working of Microcontrollers • For designing good embedded system complete understanding of microcontrollers required. • Integrated chip that typically contains integrated CPU, programmable memory (RAM ROM), parallel and/or I/O ports on a single Chip. • System on a single Chip. • Designed to execute a specific task to control a single system. • Smaller & specified (design cost). • Differs from Microprocessor. • General -purpose chip. • Used to design multipurpose computers or devices.
- 12. 12 • Require multiple chips to handle various tasks. • Timers and signal generators • Analog to Digital (A/D) and/or Digital to Analog (D/A) conversion 4.3 DIFFERENCE BETWEEN MICROPROCESSOR AND MICROCONTROLLER MICROPROCESSOR MICROCONTROLLER Microprocessor assimilates the function of a central processing unit (CPU) on to a single integrated circuit (IC). Microcontroller can be considered as a small computer which has a processor and some other components in order to make it a computer. Microprocessors are mainly used in designing general purpose systems from small to large and complex systems like super computers. Microcontrollers are used in automatically controlled devices. Microprocessors are basic components of personal computers. Microcontrollers are generally used in embedded systems Computational capacity of microprocessor is very high. Hence can perform complex tasks. Less computational capacity when compared to microprocessors. Usually used for simpler tasks.
- 13. 13 A microprocessor based system can perform numerous tasks. A microcontroller based system can perform single or very few tasks. Microprocessors have integrated Math Coprocessor. Complex mathematical calculations which involve floating point can be performed with great ease. Microcontrollers do not have math coprocessors. They use software to perform floating point calculations which slows down the device. The main task of microprocessor is to perform the instruction cycle repeatedly. This includes fetch, decode and execute. In addition to performing the tasks of fetch, decode and execute, a microcontroller also controls its environment based on the output of the instruction cycle. In order to build or design a system (computer), a microprocessor has to be connected externally to some other components like Memory (RAM and ROM) and Input / Output ports. The IC of a microcontroller has memory (both RAM and ROM) integrated on it along with some other components like I / O devices and timers.
- 14. 14 The overall cost of a system built using a microprocessor is high. This is because of the requirement of external components. Cost of a system built using a microcontroller is less as all the components are readily available. Generally power consumption and dissipation is high because of the external devices. Hence it requires external cooling system. Power consumption is less. Instruction throughput is given higher priority than interrupt latency. In contrast, microcontrollers are designed to optimize interrupt latency.
- 15. 15 CHAPTER 5 AVR MICROCONTROLLER 5.1 INTRODUCTION Fig. 5.1 AVR AVR stands for Advanced Virtual RISC. The AVR is a modified Harvard architecture 8-bit RISC single chip microcontroller which was developed by Atmel in 1996. The AVR was one of the first microcontroller families to use on- chip flash memory for program storage, as opposed to one-time programmable ROM, EPROM, or EEPROM used by other microcontrollers at the time. 5.2 CLASSIFICATION OF AVR AVRs are generally classified into following: Tiny AVR — the A tiny series 0.5–16 kB program memory 6–32-pin package Limited peripheral set
- 16. 16 Mega AVR — the A mega series 4–512 KB program memory 28–100-pin package Extended instruction set (multiply instructions and instructions for handling larger program memories) Extensive peripheral set XMEGA — the A xmega series 16–384 KB program memory 44–64–100-pin package (A4, A3, A1) Extended performance features, such as DMA, "Event System", and cryptography support. Extensive peripheral set with ADCs. Mostly instruction Execute in Single clock cycle. Which makes it faster among 8 bit microcontrollers. AVR was designed for efficient execution of compiled C code. 5.3ARCHITECTURE OF AVR The AVR is a Harvard architecture CPU. Harvard Architecture • Computer architectures that used physically separate storage and signal pathways for their instructions and data. • CPU can read both an instruction and data from memory at the same time that makes it faster. Von Neumann architecture CPU can Read an instruction or data from/to the memory. Read, Write can`t occur at the same time due to same memory and signal pathway for data and instructions.
- 17. 17 Fig. 5.2 Architecture of AVR Connection of components with CPU within a Microcontroller is called a BUS. There are three types of bus: 1. Address Bus: It specifies the address. 2. Data Bus: It reads and writes on a specific address. 3. Control Bus: it controls the actions by sending and receiving messages, thus it is bidirectional. Key of microcontroller: 1. Register: it is a temporary storage and is a part of RAM. There are two types of registers- General Purpose Registers (GPR) and Specific Function Registers (SFR). GENERAL purpose 32 general purpose registers having storage capacity of 8 bit Named as R0,R1,R2 to R31. Register 0 to 15 & 16 to 31 are different. Can store both Data & Addresses.
- 18. 18 SPECIAL purpose: Three registers Program counter Stack Pointer Status Register 2. Program Counter: it contains the address of next instruction to be executed by the CPU. It is also a register. 3. Accumulator: it is an intermediate register on which all Arithmetic and Logical operations are performed. 4. Clock Signals: these are digital signals which synchronize the action of a microcontroller. 5. Flash ROM: it is where the program code is stored. It is a fast erasing technology and erases all the contents at a time. 6. Interrupt: The interrupts refer to a notification, communicated to the controller, by a hardware device or software, on receipt of which controller momentarily stops and responds to the interrupt. 7. Stack: stack is used for the execution of the program. Whenever an interrupt occurs or a subroutine is called, the previous section of program is pushed onto the stack. After execution of the interrupt or the subroutine the execution is resumed from that part which was getting executed previously. 5.4 ATMEGA8 Fig. 5.3 Atmega8
- 19. 19 5.4.1 ATmega8 - RISC Architecture ● 130 Instructions – Most Single-clock Cycle Execution ● 32 x 8 General Purpose Working Registers ● 64 x 8 Special Function Registers (I/O Registers) ● Up to 16 MIPS Throughput at 16 MHz ● On-chip 2-cycle Multiplier Nonvolatile Program and Data Memories ● 8K Bytes of In-System Self-Programmable Flash 10,000 Write/Erase Cycles ● Optional Boot Code Section with Independent Lock Bits ● 512 Bytes EEPROM (100,000 Write/Erase Cycles) ● 1K Byte Internal SRAM ● Programming Lock for Software Security Peripheral Features ● Two 8-bit Timer/Counters ● One 16-bit Timer/Counter with Capture Mode ● Real Time Counter with Separate Oscillator ● Three PWM Channels ● 6-channel ADC with 10 resp 8 Bit resolution (TQFP: 8 channels) ● Two-wire Serial Interface (TWI) ● Programmable Serial USART ● Master/Slave SPI Serial Interface ● Programmable Watchdog Timer with On-chip Oscillator ● On-chip Analog Comparator Special Microcontroller Features ● Programmable Brown-out Detection ● Internal Calibrated RC Oscillator ● External and Internal Interrupt Sources
- 20. 20 ● Five Sleep Modes I/O and Packages ● 23 Programmable I/O Lines ● 28-lead PDIP, 32-lead TQFP, and 32-pad MLF Operating Voltages ● 2.7 - 5.5V (ATmega8L) ● 4.5 - 5.5V (ATmega8) Speed Grades ● 0 - 8 MHz (ATmega8L) ● 0 - 16 MHz (ATmega8) Power Consumption at 4 Mhz, 3V, 25°C ● Active: 3.6 mA ● Idle Mode: 1.0 mA ● Power-down Mode: 0.5 μA
- 21. 21 5.4.2 Pin and Port Overview: Fig. 5.4 PDIP view of atmega8
- 22. 22 Fig. 5.5 TQFP top view of atmega8 GND: Ground (0V) VCC: Digital Supply Voltage (2,7 – 5,5V) AVCC: Analog Supply Voltage connect to low-pass filtered VCC AREF: Analog Reference Voltage, usually AVCC /Reset: Low level on this pin will generate a reset Port B, Port C, Port D: General Purpose 8 Bit bidirectional I/O - Ports, Optional internal pull up-resistors when configured as input Output source capability: 20mA
- 23. 23 Special Functions of the Ports available as configured using the SFRs: Port D: Uart, external Interrupts, Analog Comparator Port B: External Oscillator/Crystal, SPI Port C: A/D converters, TWI 5.4.3 ATMEGA 8 CORE ARCHITECTURE Fig. 5.6 Core Architecture of atmega8 ● Seperate Instruction and Data Memories (Harvard) ● all 32 General Purpose Registers connected to ALU
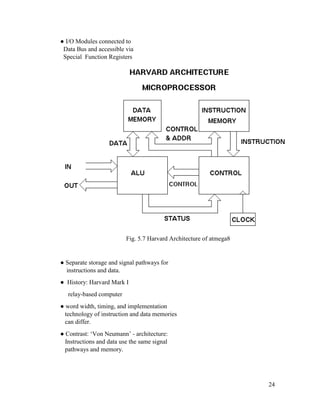
- 24. 24 ● I/O Modules connected to Data Bus and accessible via Special Function Registers Fig. 5.7 Harvard Architecture of atmega8 ● Separate storage and signal pathways for instructions and data. ● History: Harvard Mark I relay-based computer ● word width, timing, and implementation technology of instruction and data memories can differ. ● Contrast: ‘Von Neumann’ - architecture: Instructions and data use the same signal pathways and memory.
- 25. 25 Ability to fetch the next instruction at the same time it completes the current instruction. ● Speed is gained at the expense of more complex electrical circuitry. 5.4.4 Memory organization: Fig. 5.8 Memory Organization of Atmega8
- 26. 26 ● Program Flash Memor y: On-chip, in system programmable 8 Kbytes, organized in 4K 16 bit words Program Counter (PC) = 12 bits Accessible via special instructions: LPM, SPM Boot Loader support: Boot Flash Section, SPM can be executed only from Boot Flash ● EEPROM - Memory: 512 Bytes, single Bytes can be read and written Special EEPROM read and write procedure using SFRs: EEPROM Address Register, EEPROM Data Register, EEPROM Control Register C – Library Functions available Precautions to prevent EEPROM memory corruption: ● No flash memory or interrupt operations ● Stable power supply
- 27. 27 CHAPTER 6 PROGRAMS 6.1 7-segment display Fig. 6.1 7-Segment Display A seven-segment display (SSD), or seven-segment indicator, is a form of electronic display device for displaying decimal numerals that is an alternative to the more complex dot matrix displays. Seven-segment displays are widely used in digital clocks, electronic meters, basic calculators, and other electronic devices that display numerical information. 6.1.1 Introduction The 7 segment display can also be used for displaying numbers. Each of the segments of the display is connected to a pin on the 8051. In order to light up a segment on the pin must be set to 0V. To turn a segment off the corresponding pin must be set to 5V.
- 28. 28 This is simply done by setting the pins on the 8051 to '1' or '0'. LED displays are Power-hungry (10mA per LED) and Pin-hungry (8 pins per 7-seg display). But they are cheaper than LCD display. 7-SEG Display is available in two types -1. Common anode & 2. Common cathode, but command anode display is most suitable for interfacing with 8051 since 8051 port pins can sink current better than sourcing it. Fig. 6.2 Types of 7-Segment Display 6.1.2 Creating Digit Pattern In Common Anode display, the common Anode pin is tied to 5v .The cathode pins are connected to port 1 through 330 Ohm resistance (current limiting). For displaying Digit say 7 we need to light segments -a ,b, c. in Common anode display , to do so we have to provide Logic -0 (0 v) at cathode of these segments. So need to clear pins- P1.0 ,P1.1,P1.2. That is 1 1 1 1 1 0 0 0 -->F8h. Digit Seg. h Seg. g Seg. f Seg. e Seg. d Seg. c Seg. b Seg. a HEX 0 1 1 0 0 0 0 0 0 C0 1 1 1 1 1 1 0 0 1 F9 2 1 0 1 0 0 1 0 0 A4 3 1 0 1 1 0 0 0 0 B0 4 1 0 0 1 1 0 0 1 99 Table 6.1: Hex Code for Displaying Various Digits
- 29. 29 6.1.3 Multi 7 Segment interfacing Fig. 6.3 Interfacing Multi 7-Segment Display Since we can Enable only one 7-seg display at a time ,we need to scan these display at fast rate .the data lines are common for all the 4 segments The scanning frequency should be high enough to be flicker-free. At least 30HZ .Therefore – time one digit is ON is 1/30 seconds
- 30. 30 6.1.4 PROGRAM FOR INTERFACING OF 7 SEGMENT DIPLAY WITH AVR MICROCONTROLLER #include <avr/io.h> #include <util/delay.h> int main(void) { DDRA = 0xFF; // Configure port B as output while(1) { //TODO:: application code PORTA = 0b00110000; // Display Number 1 _delay_ms(1000); // Wait for 1s PORTA = 0b01011011; // Display Number 2 _delay_ms(1000); // Wait for 1s PORTA = 0b01001111; // Display Number 3 _delay_ms(1000); // Wait for 1s PORTA = 0b01100110; // Display Number 4 _delay_ms(1000); // Wait for 1s PORTA = 0b01110111; // Display Letter A _delay_ms(1000); // Wait for 1s PORTA = 0b00111001; // Display Letter C _delay_ms(1000); // Wait for 1s PORTA = 0b01111001; // Display Letter E _delay_ms(1000); // Wait for 1s PORTA = 0b01110001; // Display Letter F _delay_ms(1000); // Wait for 1s } return 0;}
- 31. 31 Fig. 6.4 Simulated Circuit 6.2LCD 6.2.1 Introduction A liquid-crystal display (LCD) is a flat panel display, electronic visual display, or video display that uses the light modulating properties of Liquid crystals. Liquid crystals do not emit light directly A liquid-crystal display (LCD) is a flat panel display, electronic visual display, or video display that uses the light modulating properties of Liquid crystals. Liquid crystals do not emit light directly
- 32. 32 Fig. 6.5 LCD A liquid crystal display, is a thin, flat panel used for electronically displaying information such as text, images, and moving pictures. Its uses include monitors for computers, televisions, instrument panels, and other devices ranging from aircraft cockpit displays, to every-day consumer devices such as video players, gaming devices, clocks, watches, calculators, and telephones. Among its major features are its lightweight construction, its portability, and its ability to be produced in much larger screen sizes than are practical for the construction of cathode ray tube (CRT) display technology. Its low electrical power consumption enables it to be used in battery-powered electronic equipment. It is an electronically-modulated optical device made up of any number of pixels filled with liquid crystals and arrayed in front of a light source (backlight) or reflector to produce images in color or monochrome.
- 33. 33 6.2.2 Program of 16x2 LCD interfacing with AVR microcontroller atmega8 #include <avr/io.h> void delay(unsigned char); //Main Code int main() { DDRB=0xff; //set PORTB as out put DDRD=0b01110000; //Set PD.4,5 and 6 as Output /* RS=PD5 R/W=PD6 E=PD4 */ //Give Inital Delay for LCD to startup as LCD is a slower Device delay(2); init_lcd(); while(1) { lcd_cmd(0x80); //Goto Line-1,first position lcd_send_string("WELCOME TO! "); lcd_cmd(0xC0); //Goto Line-2, first position lcd_send_string("EGLOB :) "); lcd_cmd(0x01); //Clear the lcd delay(1);
- 34. 34 } } //LCD function /*------------------------------------------------------------------------------------------------------------*/ //Function for sending commands to LCD void lcd_cmd(unsigned char command) { //Put command on the Data Bus PORTB = command; //Enable LCD for command writing PORTD = 0b00010000; //Allow delay for LCD to read the databus delay(1); //Disable LCD again PORTD = 0b00000000; //Allow some more delay delay(1); } //Function for sending Data to LCD void lcd_data(unsigned char data) { //Put data on Data Bus PORTB= data; //Set R/S (Regiter Select) to High, and Enable to High PORTD = 0b00110000; //Allow for delay
- 35. 35 delay(1); //Disable LCD again PORTD = 0b00100000; //Allow for some more delay delay(1); } //Function to send String to LCD void lcd_send_string(char* string) { while(*string) { //Send value of pointer as data to LCD lcd_data(*string); //Increment string pointer string++; } } //Function to Initilise LCD void init_lcd() { //Setup both lines of LCD lcd_cmd(0x38); //Set Cursor off - Enable LCD lcd_cmd(0x0E); //Clear Screen lcd_cmd(0x01); //Goto first position lcd_cmd(0x80); } /*----------------------------------------------------------------------------------------------------------*/ //Delay function
- 36. 36 void delay(unsigned char dtime) { int i,j; for(i=0;i<=dtime;i++) { for(j=0;j<5000;j++); }} //You can use your own delay functions and replace this delay function with your code /*-----------------------------------------------------------------------------------------------------------*/ Fig. 6.6 Simulated Circuit