






















![24
Discrete
Fourier
Transform
Sampling
(Properties)
2-D
If f(x,y) is band limited (that is, its
Fourier transform vanishes outside
some finite region R) the result of
covolving S(u,v) and F(u,v) might
look like the case in the case
shown in the figure. The function
shown is periodic in two
dimensions.
0
1
v
,
u
G
(u,v) inside one of the rectangles
enclosing R
elsewhere
The inverse Fourier transform of
G(u,v)[S(u,v)*F(u,v)] yields f(x,y).](https://image.slidesharecdn.com/imagetrnsformations-250129085607-5d0913b9/85/Unit-i-Image-Transformations-Gonzalez-ppt-24-320.jpg)












![39
Haar Transform
The Haar transform is based on the Haar functions, hk(z), which are defined over the
continuous, closed interval [0,1] for z, and for k=0,1,2,…,N-1, where N=2n
. The first
step in generating the Haar transform is to note that the integer k can be decomposed
uniquely as k=2p
+q-1
where 0≤p≤n-1, q=0 or 1 for p=0, and 1≤q≤2p
for p≠0.
With this background, the Haar functions are defined as
1
,
0
z
for
otherwise
0
2
q
z
2
2
/
1
q
2
2
2
/
1
q
z
2
1
q
2
N
1
z
h
z
h
and
1
,
0
z
for
N
1
z
h
z
h
p
p
2
/
p
p
p
2
/
p
00
k
00
0
](https://image.slidesharecdn.com/imagetrnsformations-250129085607-5d0913b9/85/Unit-i-Image-Transformations-Gonzalez-ppt-39-320.jpg)







![Decor relation by construction
note: other matrices (unitary or nonunitary) may also de-correlate the transformed sequence [Jain’s example 5.5 and 5.7]
Properties of K-L Transform
Minimizing MSE under basis restriction
Basis restriction: Keep only a subset of m transform coefficients and then
perform inverse transform (1 m N)
Keep the coefficients w.r.t. the eigenvectors of the first m largest
eigenvalues](https://image.slidesharecdn.com/imagetrnsformations-250129085607-5d0913b9/85/Unit-i-Image-Transformations-Gonzalez-ppt-47-320.jpg)







![SVD
Treat as black box: code widely
available
In Matlab: [U,W,V]=svd(A,0)
T
1
0
0
0
0
0
0
V
U
A
n
w
w
](https://image.slidesharecdn.com/imagetrnsformations-250129085607-5d0913b9/85/Unit-i-Image-Transformations-Gonzalez-ppt-55-320.jpg)









Unit - i-Image Transformations Gonzalez.ppt
- 2. CONTENTS Need for Image Transforms, Spatial Frequencies in Image Processing Introduction to Fourier Transform, Discrete Fourier Transform, Fast Fourier Transform and its algorithm Properties of Fourier transform Discrete Cosine Transform Discrete Sine Transform Walsh Transform, Hadamard Transform Haar Transform, Slant Transform SVD and KLTransforms or Hotelling Transform 2
- 3. 3 Introduction Definition: Image transform = operation to change the default representation space of a digital image (spatial domain -> another domain) so that: all the information present in the image is preserved in the transformed domain, but represented differently; the transform is reversible, i.e., we can revert to the spatial domain
- 4. Need for transform Mathematical convenience To explore more details Critical image components are isolated so that user can directly deal with it Compact form of representation to store and transmit 4
- 5. 5 Fourier Transform (1-D) uX uX sin AX u F e uX sin u A dx ux 2 j exp x f u F uX j
- 6. 6 Fourier Transform (2-D) vY vY sin uX uX sin AXY v , u F dy dx vy ux 2 j exp y , x f ) v , u ( F
- 7. 7 Discrete Fourier Transform In the two-variable case the discrete Fourier transform pair is
- 8. 8 Discrete Fourier Transform When images are sampled in a squared array, i.e. M=N, we can write
- 9. 9 Discrete Fourier Transform Examples At all of these examples, the Fourier spectrum is shifted from top left corner to the center of the frequency square.
- 10. 10 Discrete Fourier Transform Examples At all of these examples, the Fourier spectrum is shifted from top left corner to the center of the frequency square.
- 11. 11 Discrete Fourier Transform Display At all of these examples, the Fourier spectrum is shifted from top left corner to the center of the frequency square.
- 12. 12 Discrete Fourier Transform Example Main Image (Gray Level) DFT of Main image (Fourier spectrum) Logarithmic scaled of the Fourier spectrum
- 13. 13 Discrete Fourier Transform (Properties) Separability The discrete Fourier transform pair can be expressed in the seperable forms: 1 N 0 v 1 N 0 u 1 N 0 y 1 N 0 x N / vy 2 j exp v , u F N / ux 2 j exp N 1 y , x f N / vy 2 j exp y , x f N / ux 2 j exp N 1 v , u F
- 14. 14 Discrete Fourier Transform (Properties) Translation N / vy ux 2 j exp v , u F y y , x x f and v v , u u F N / y v x u 2 j exp y , x f 0 0 0 0 0 0 0 0 The translation properties of the Fourier transform pair are :
- 15. 15 Discrete Fourier Transform (Properties) Periodicity The discrete Fourier transform and its inverse are periodic with period N; that is, F(u,v)=F(u+N,v)=F(u,v+N)=F(u+N,v+N) If f(x,y) is real, the Fourier transform also exhibits conjugate symmetry: F(u,v)=F* (-u,-v) Or, more interestingly: |F(u,v)|=|F(-u,-v)|
- 16. 16 Discrete Fourier Transform (Properties) Rotation If we introduce the polar coordinates sin v cos u sin r y cos r x Then we can write: 0 0 , F , r f In other words, rotating F(u,v) rotates f(x,y) by the same angle.
- 17. 17 Discrete Fourier Transform (Properties) Convolution The convolution theorem in two dimensions is expressed by the relations : v , u G * v , u F y , x g y , x f and v , u G v , u F ) y , x ( g * y , x f Note : d d y , x g , f y , x g * y , x f
- 18. 18 Discrete Fourier Transform (Properties) Correlation The correlation of two continuous functions f(x) and g(x) is defined by the relation d x g f x g x f * So we can write: v , u G v , u F y , x g y , x f and v , u G v , u F y , x g y , x f * *
- 19. 19 Discrete Fourier Transform Sampling (Properties) 1-D The Fourier transform and the convolution theorem provide the tools for a deeper analytic study of sampling problem. In particular, we want to look at the question of how many samples should be taken so that no information is lost in the sampling process. Expressed differently, the problem is one of the establishing the sampling conditions under which a continuous image can be recovered fully from a set of sampled values. We begin the analysis with the 1-D case. As a result, a function which is band-limited in frequency domain must extend from negative infinity to positive infinity in time domain (or x domain).
- 20. 20 Discrete Fourier Transform Sampling (Properties) 1-D f(x) : a given function F(u): Fourier Transform of f(x) which is band-limited s(x) : sampling function S(u): Fourier Transform of s(x) G(u): window for recovery of the main function F(u) and f(x). Recovered f(x) from sampled data
- 21. 21 Discrete Fourier Transform Sampling (Properties) 1-D f(x) : a given function F(u): Fourier Transform of f(x) which is band-limited s(x) : sampling function S(u): Fourier Transform of s(x) h(x): window for making f(x) finited in time. H(u): Fourier Transform of h(x)
- 22. 22 Discrete Fourier Transform Sampling (Properties) 1-D s(x)*f(x) (convolution function) is periodic, with period 1/Δu. If N samples of f(x) and F(u) are taken and the spacings between samples are selected so that a period in each domain is covered by N uniformly spaced samples, then NΔx=X in the x domain and NΔu=1/Δx in the frequency domain.
- 23. 23 Discrete Fourier Transform Sampling (Properties) 2-D The sampling process for 2-D functions can be formulated mathematically by making use of the 2-D impulse function δ(x,y), which is defined as 0 0 0 0 y , x f dy dx y y , x x y , x f A 2-D sampling function is consisted of a train of impulses separated Δx units in the x direction and Δy units in the y direction as shown in the figure.
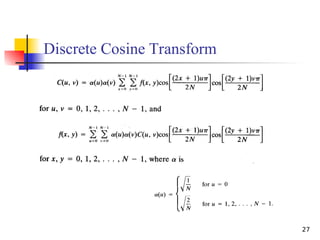
- 24. 24 Discrete Fourier Transform Sampling (Properties) 2-D If f(x,y) is band limited (that is, its Fourier transform vanishes outside some finite region R) the result of covolving S(u,v) and F(u,v) might look like the case in the case shown in the figure. The function shown is periodic in two dimensions. 0 1 v , u G (u,v) inside one of the rectangles enclosing R elsewhere The inverse Fourier transform of G(u,v)[S(u,v)*F(u,v)] yields f(x,y).
- 25. 25 The Fast Fourier Transform (FFT) Algorithm
- 26. Discrete Sine Transform (DST) 26 The discrete Sine transform (DST): v(k,l) 2 N 1 u(m,n) sin (m 1)(k 1) N 1 sin (n 1)(l 1) N 1 n 0 N 1 m 0 N 1 (4.52) u(m,n) 2 N 1 v(k,l) sin (m 1)(k 1) N 1 sin (n 1)(l 1) N 1 l 0 N 1 k 0 N 1 (4.53) s 2 N 1 sin (m 1)(k 1) N 1 m,k (4.54) The Hartley transform: v(k,l) 1 N u(m,n)cas 2 N (mk nl) n 0 N 1 m 0 N 1 (4.55) u m n ( , ) 1 N v(k,l)cas 2 N (mk nl) l 0 N 1 k 0 N 1 (4.56) cas( ) cos( ) sin( ) 2cos( / 4) (4.57) h 1 N m,k cas mk N 2 (4.58)
- 28. 28 Discrete Cosine Transform (DCT) Each block consists of 4×4 elements, corresponding to x and y varying from 0 to 3. The highest value is shown in white. Other values are shown in grays, with darker meaning smaller.
- 29. 29 Discrete Cosine Transform Example Main Image (Gray Level) DCT of Main image (Cosine spectrum) Logarithmic scaled of the Cosine spectrum
- 30. 30 Walsh Transform When N=2n , the 2-D forward and inverse Walsh kernels are given by the relations 1 n 0 i v b y b u b x b 1 n 0 i v b y b u b x b i 1 n i i 1 n i i 1 n i i 1 n i 1 N 1 v , u , y , x h and 1 N 1 v , u , y , x g Where bk(z) is the kth bit in the binary representation of z. So the forward and inverse Walsh transforms are equal in form; that is:
- 31. 31 Walsh Transform “+” denotes for +1 and “-” denotes for -1. 1 n 0 i u b x b i 1 n i 1 N 1 u , x g In 1-D case we have : In the following table N=8 so n=3 (23 =8). 1-D kernel
- 32. 32 Walsh Transform This figure shows the basis functions (kernels) as a function of u and v (excluding the 1/N constant term) for computing the Walsh transform when N=4. Each block corresponds to varying x and y form 0 to 3 (that is, 0 to N-1), while keeping u and v fixed at the values corresponding to that block. Thus each block consists of an array of 4×4 binary elements (White means “+1” and Black means “-1”). To use these basis functions to compute the Walsh transform of an image of size 4×4 simply requires obtaining W(0,0) by multiplying the image array point-by-point with the 4×4 basis block corresponding to u=0 and v=0, adding the results, and dividing by 4, and continue for other values of u and v.
- 33. 33 Walsh Transform Example Main Image (Gray Level) WT of Main image (Walsh spectrum) Logarithmic scaled of the Walsh spectrum
- 34. 34 Hadamard Transform When N=2n , the 2-D forward and inverse Hadamard kernels are given by the relations 1 n 0 i v b y b u b x b 1 n 0 i v b y b u b x b i i i i i i i i 1 N 1 v , u , y , x h and 1 N 1 v , u , y , x g Where bk(z) is the kth bit in the binary representation of z. So the forward and inverse Hadamard transforms are equal in form; that is:
- 36. 36 Hadamard Transform 1 n 0 i u b x b i i 1 N 1 u , x g In 1-D case we have : In the following table N=8 so n=3 (23 =8). 1-D kernel “+” denotes for +1 and “-” denotes for -1.
- 37. 37 Hadamard Transform This figure shows the basis functions (kernels) as a function of u and v (excluding the 1/N constant term) for computing the Hadamard transform when N=4. Each block corresponds to varying x and y form 0 to 3 (that is, 0 to N-1), while keeping u and v fixed at the values corresponding to that block. Thus each block consists of an array of 4×4 binary elements (White means “+1” and Black means “-1”) like Walsh transform. If we compare these two transforms we can see that they only differ in the sense that the functions in Hadamard transform are ordered in increasing sequency and thus are more “natural” to interpret.
- 38. 38 Hadamard Transform Example Main Image (Gray Level) HT of Main image (Hadamard spectrum) Logarithmic scaled of the Hadamard spectrum
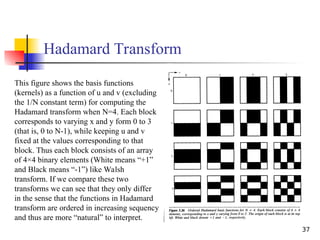
- 39. 39 Haar Transform The Haar transform is based on the Haar functions, hk(z), which are defined over the continuous, closed interval [0,1] for z, and for k=0,1,2,…,N-1, where N=2n . The first step in generating the Haar transform is to note that the integer k can be decomposed uniquely as k=2p +q-1 where 0≤p≤n-1, q=0 or 1 for p=0, and 1≤q≤2p for p≠0. With this background, the Haar functions are defined as 1 , 0 z for otherwise 0 2 q z 2 2 / 1 q 2 2 2 / 1 q z 2 1 q 2 N 1 z h z h and 1 , 0 z for N 1 z h z h p p 2 / p p p 2 / p 00 k 00 0
- 40. 40 Haar Transform Haar transform matrix for sizes N=2,4,8 1 1 1 1 2 1 Hr2 2 0 1 1 2 0 1 1 0 2 1 1 0 2 1 1 4 1 Hr4 2 0 0 0 2 0 1 1 2 0 0 0 2 0 1 1 0 2 0 0 2 0 1 1 0 2 0 0 2 0 1 1 0 0 2 0 0 2 1 1 0 0 2 0 0 2 1 1 0 0 0 2 0 2 1 1 0 0 0 2 0 2 1 1 8 1 Hr8 Can be computed by taking sums and differences. Fast algorithms by recursively applying Hr2.
- 43. 43 Slant Transform The Slant Transform matrix of order N*N is the recursive expression
- 44. 44 Slant Transform 1 1 1 1 2 1 S2 2 1 2 2 N 1 N 4 N 3 a Where I is the identity matrix, and 2 1 2 2 N 1 N 4 4 N b
- 45. 45 Slant Transform Example Main Image (Gray Level) Slant Transform of Main image (Slant spectrum)
- 46. Karhunen-Loève Transform (KLT) a unitary transform with the basis vectors in A being the “orthonormalized” eigenvectors of Rx assume real input, write AT instead of AH denote the inverse transform matrix as A, AAT =I Rx is symmetric for real input, Hermitian for complex input i.e. Rx T =Rx, Rx H = Rx Rx nonnegative definite, i.e. has real non-negative eigen values Attributions Kari Karhunen 1947, Michel Loève 1948 a.k.a Hotelling transform (Harold Hotelling, discrete formulation 1933) a.k.a. Principle Component Analysis (PCA, estimate Rx from samples)
- 47. Decor relation by construction note: other matrices (unitary or nonunitary) may also de-correlate the transformed sequence [Jain’s example 5.5 and 5.7] Properties of K-L Transform Minimizing MSE under basis restriction Basis restriction: Keep only a subset of m transform coefficients and then perform inverse transform (1 m N) Keep the coefficients w.r.t. the eigenvectors of the first m largest eigenvalues
- 48. discussions about KLT The good Minimum MSE for a “shortened” version De-correlating the transform coefficients The ugly Data dependent Need a good estimate of the second-order statistics Increased computation complexity Is there a data-independent transform with similar performance? data: linear transform: estimate Rx: compute eig Rx: fast transform:
- 49. DCT energy compaction DCT is close to KLT for DCT is a good replacement for KLT Close to optimal for highly correlated data Not depend on specific data Fast algorithm available highly-correlated first-order stationary Markov source
- 50. KL transform for images autocorrelation function 1D 2D KL basis images are the orthonormalized eigen-functions of R rewrite images into vector forms (N2 x1) solve the eigen problem for N2 xN2 matrix ~ O(N6 ) if Rx is “separable” perform separate KLT on the rows and columns transform complexity O(N3 )
- 51. KLT on hand-written digits … 1100 digits “6” 16x16 pixels 1100 vectors of size 256x1
- 53. Underconstrained Least Squares Problem: if problem very close to singular, roundoff error can have a huge effect Even on “well-determined” values! Can detect this: Uncertainty proportional to covariance C = (AT A)-1 In other words, unstable if AT A has small values More precisely, care if xT (AT A)x is small for any x Idea: if part of solution unstable, set answer to 0 Avoid corrupting good parts of answer
- 54. Singular Value Decomposition (SVD) Handy mathematical technique that has application to many problems Given any mn matrix A, algorithm to find matrices U, V, and W such that A = UWVT U is mn and orthonormal W is nn and diagonal V is nn and orthonormal
- 55. SVD Treat as black box: code widely available In Matlab: [U,W,V]=svd(A,0) T 1 0 0 0 0 0 0 V U A n w w
- 56. SVD The wi are called the singular values of A If A is singular, some of the wi will be 0 In general rank(A) = number of nonzero wi SVD is mostly unique (up to permutation of singular values, or if some wi are equal)
- 57. SVD and Inverses Why is SVD so useful? Application #1: inverses A-1 =(VT )-1 W-1 U-1 = VW-1 UT Using fact that inverse = transpose for orthogonal matrices Since W is diagonal, W-1 also diagonal with reciprocals of entries of W
- 58. SVD and Inverses A-1 =(VT )-1 W-1 U-1 = VW-1 UT This fails when some wi are 0 It’s supposed to fail – singular matrix Pseudoinverse: if wi=0, set 1/wi to 0 (!) “Closest” matrix to inverse Defined for all (even non-square, singular, etc.) matrices Equal to (AT A)-1 AT if AT A invertible
- 59. SVD and Least Squares Solving Ax=b by least squares x=pseudoinverse(A) times b Compute pseudoinverse using SVD Lets you see if data is singular Even if not singular, ratio of max to min singular values (condition number) tells you how stable the solution will be Set 1/wi to 0 if wi is small (even if not exactly 0)
- 60. SVD and Eigenvectors Let A=UWVT , and let xi be ith column of V Consider AT A xi: So elements of W are sqrt(eigenvalues) and columns of V are eigenvectors of AT A What we wanted for robust least squares fitting! i i i i i i x w w x x x 2 2 2 T 2 T T T T 0 0 0 1 0 V VW V VW UWV U VW A A
- 61. SVD and Matrix Similarity One common definition for the norm of a matrix is the Frobenius norm: Frobenius norm can be computed from SVD So changes to a matrix can be evaluated by looking at changes to singular values i j ij a 2 F A i i w 2 F A
- 62. SVD and Matrix Similarity Suppose you want to find best rank-k approximation to A Answer: set all but the largest k singular values to zero Can form compact representation by eliminating columns of U and V corresponding to zeroed wi
- 63. 63 Comparison Of Various Transforms
- 64. 64 Comparison Of Various Transforms